2025, 47(5): 1230-1265.
doi: 10.11999/JEIT240966
Abstract:
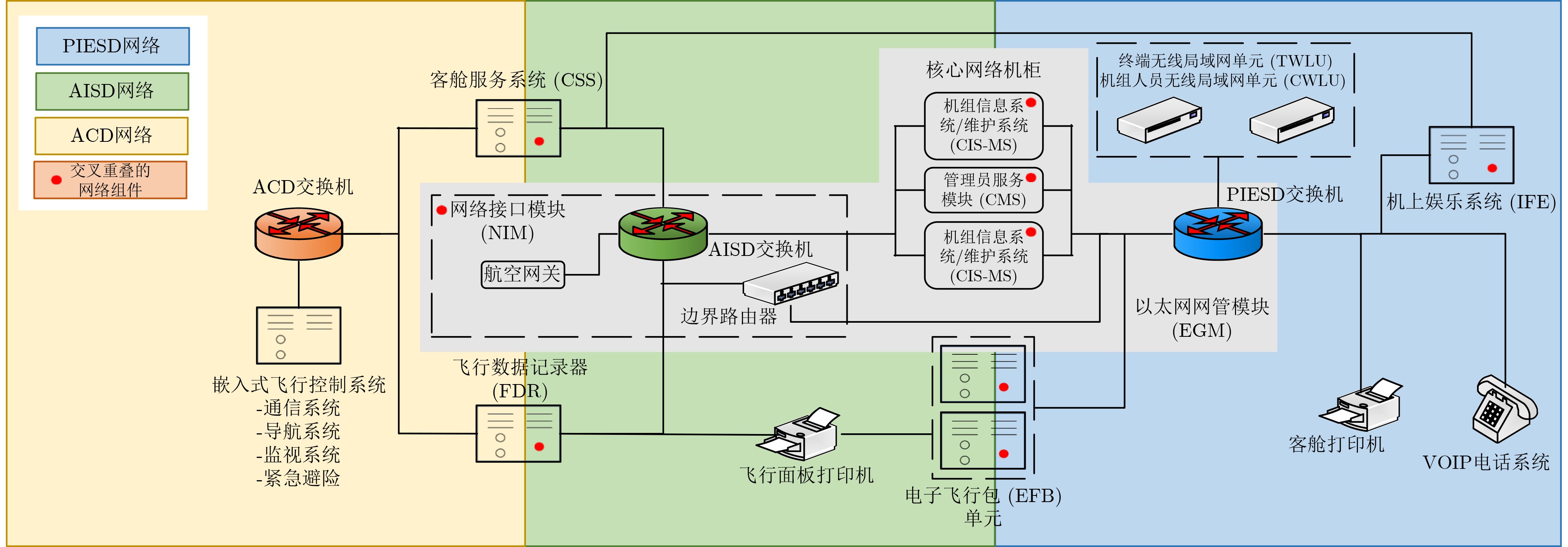
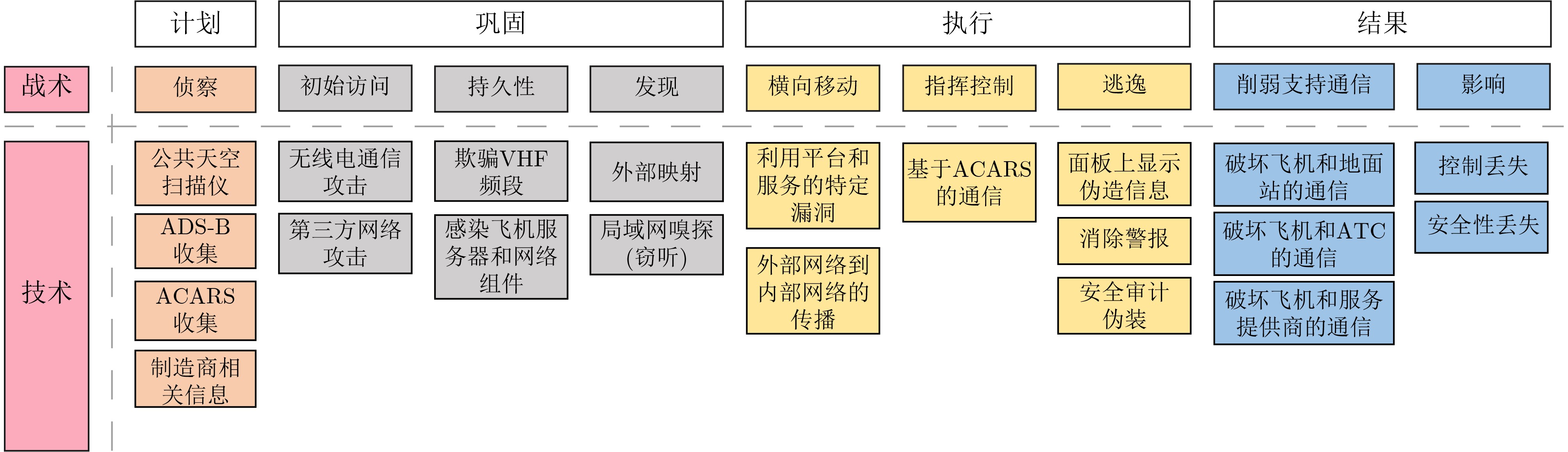
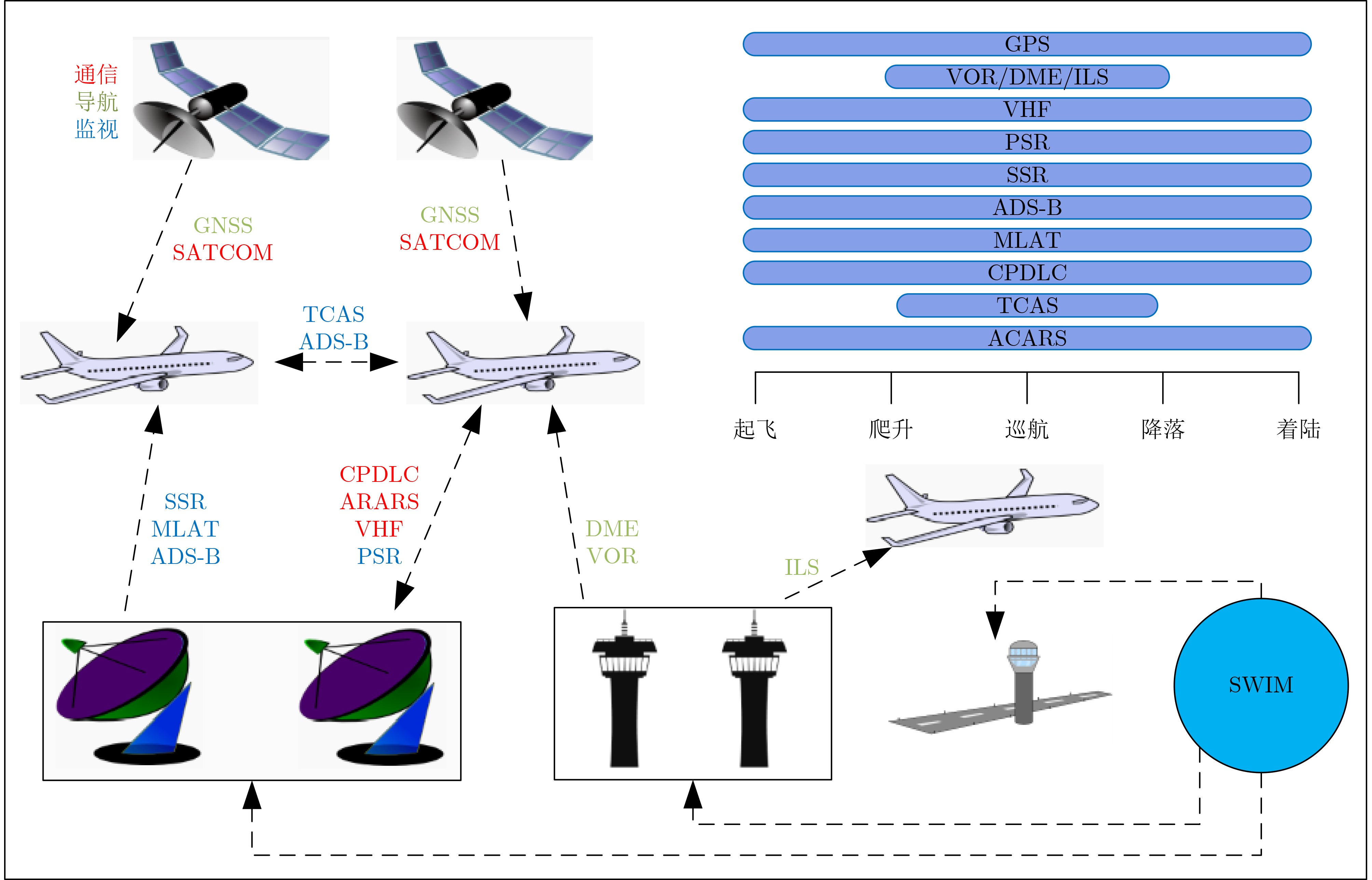
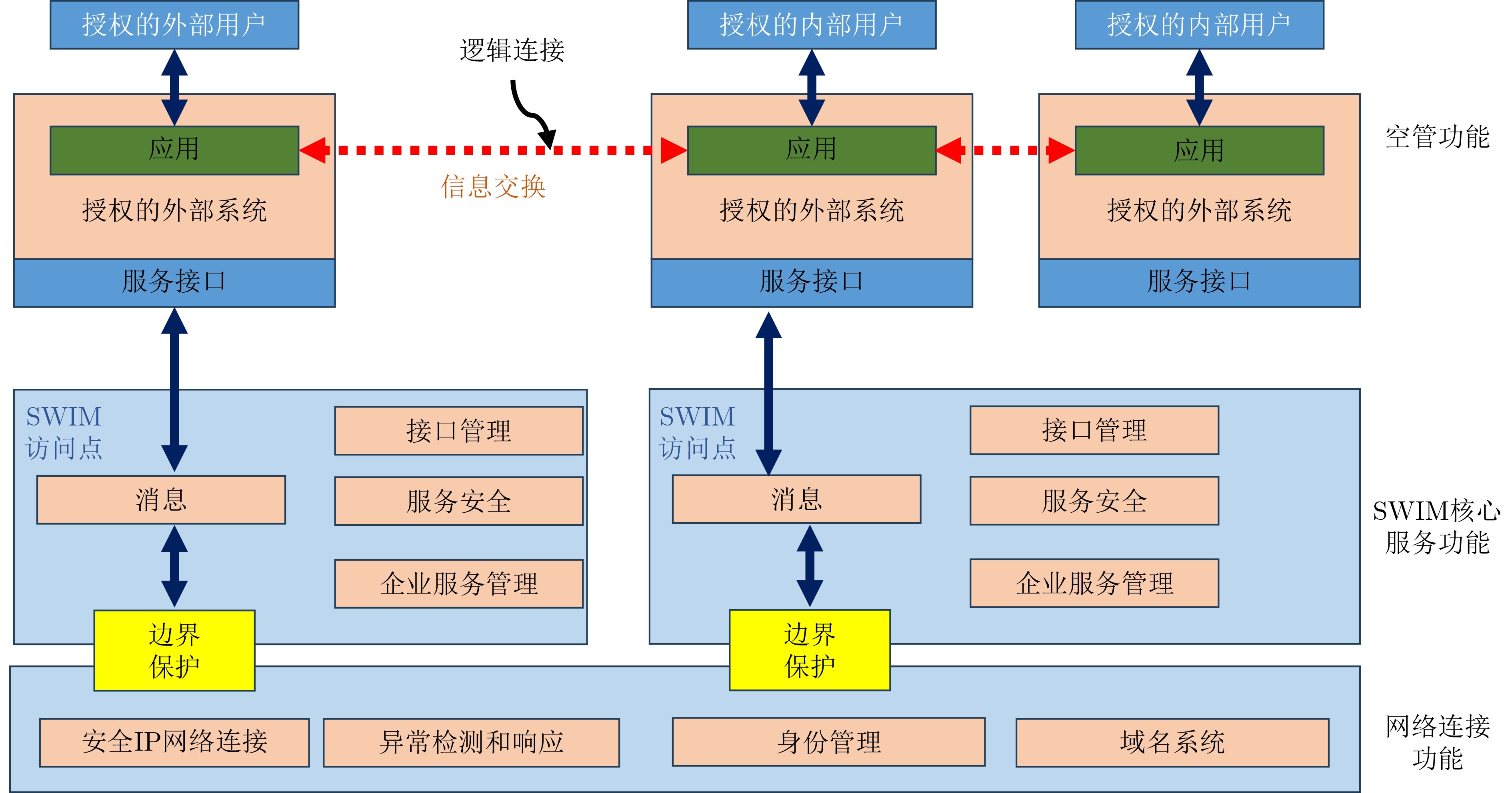
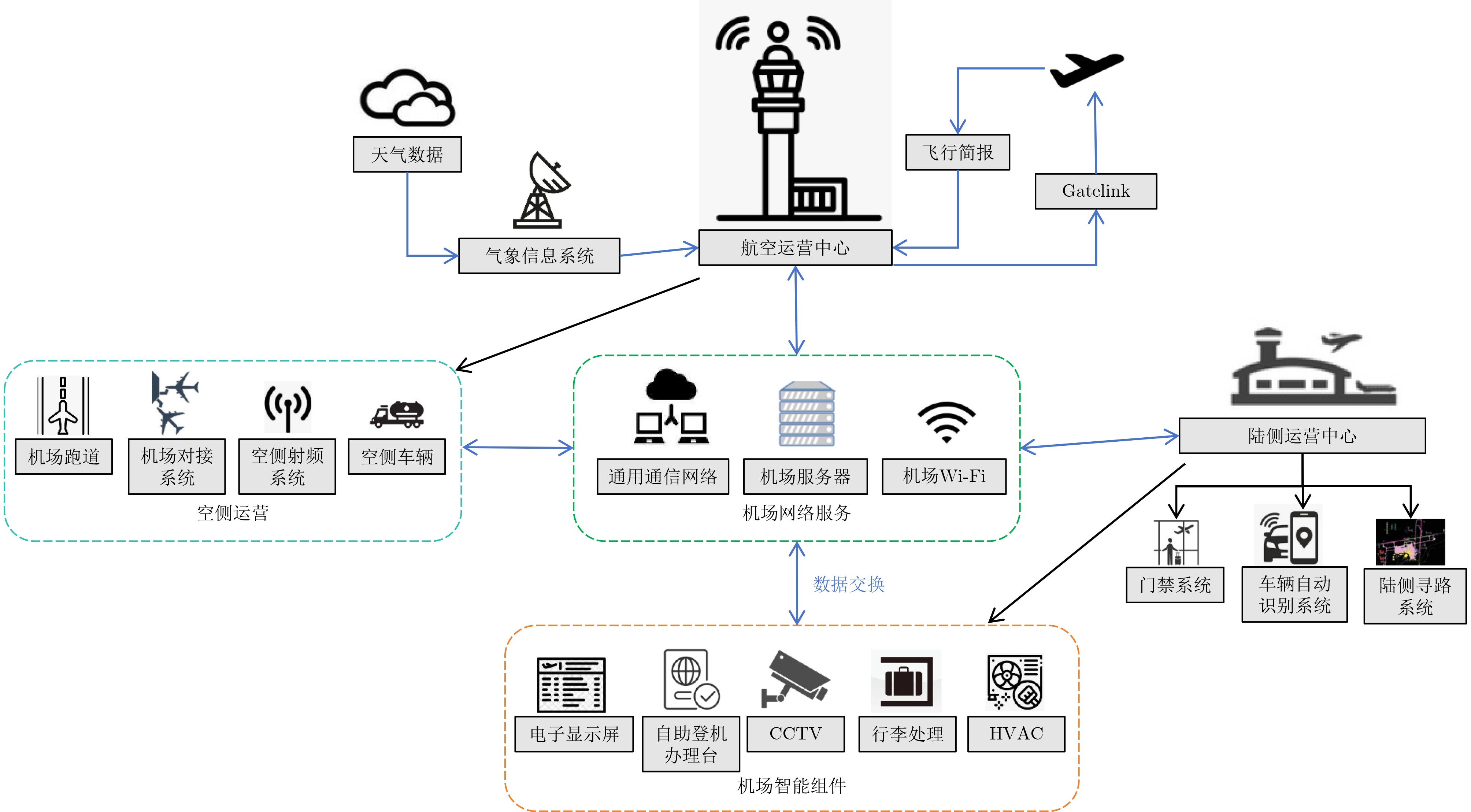
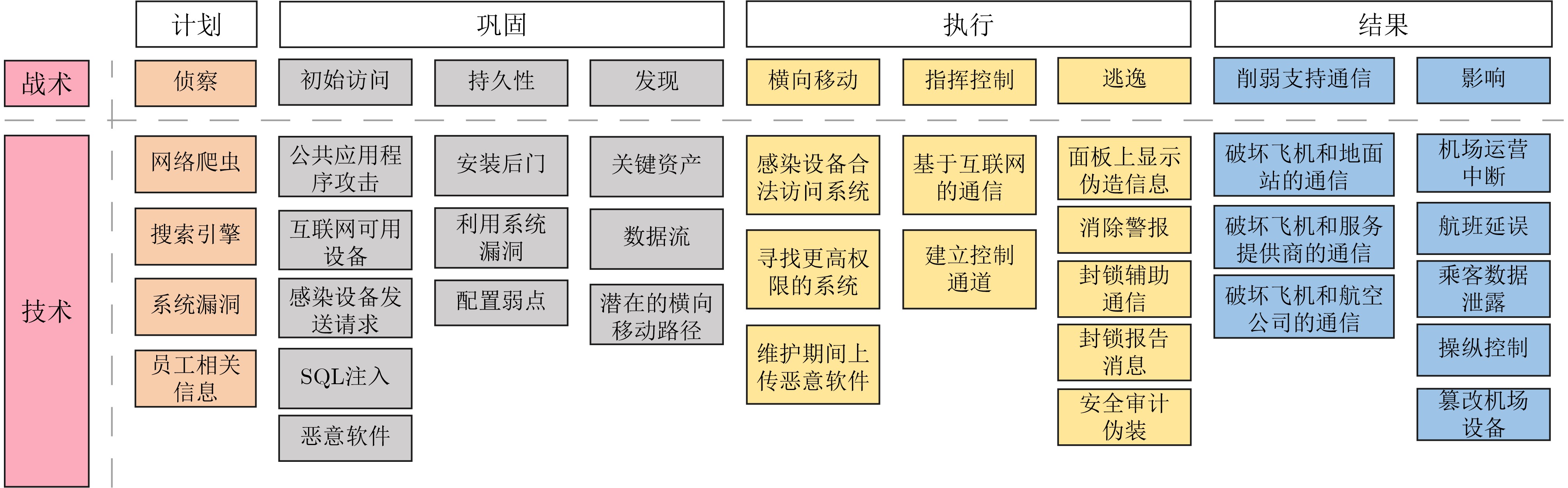
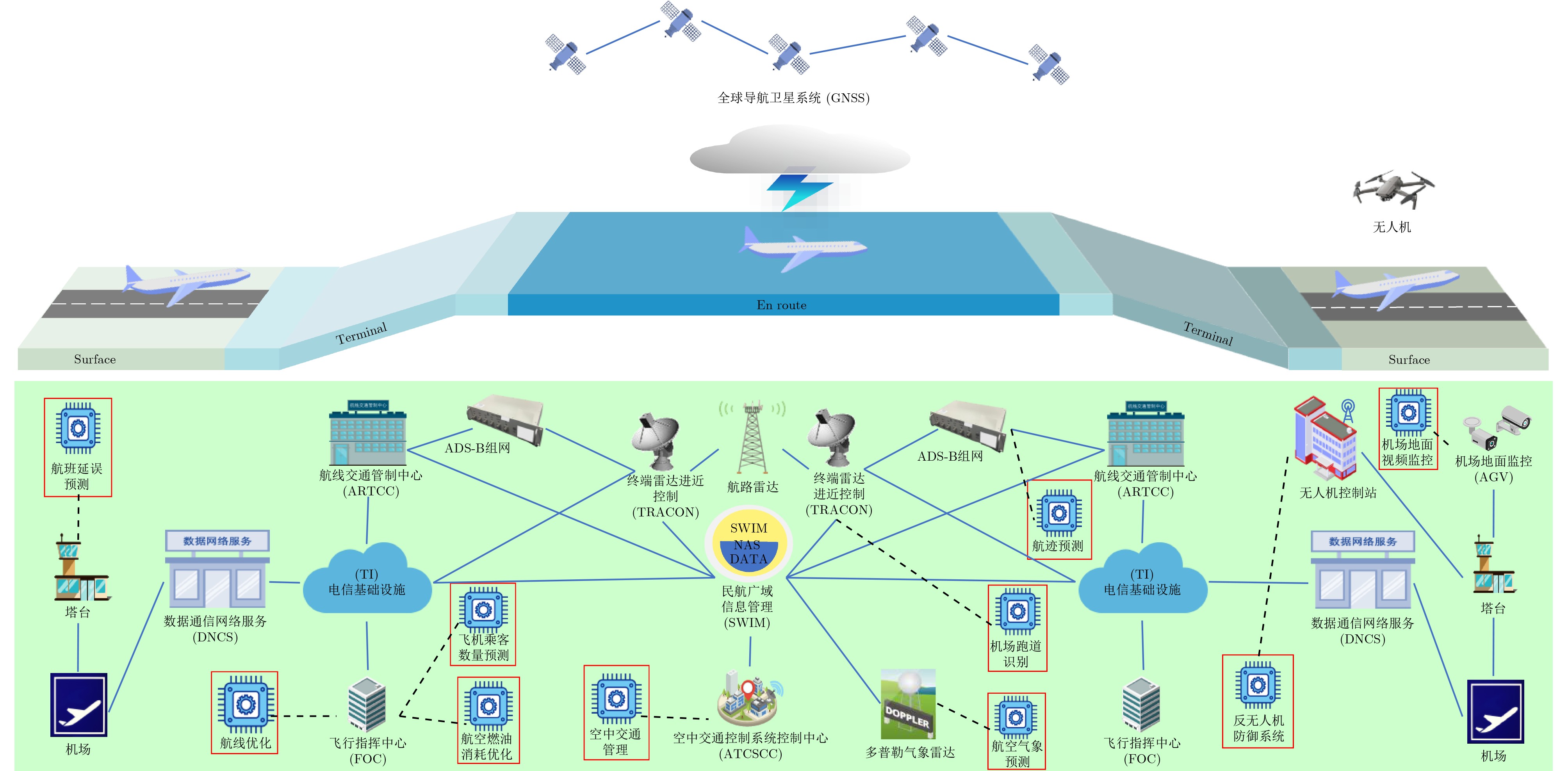
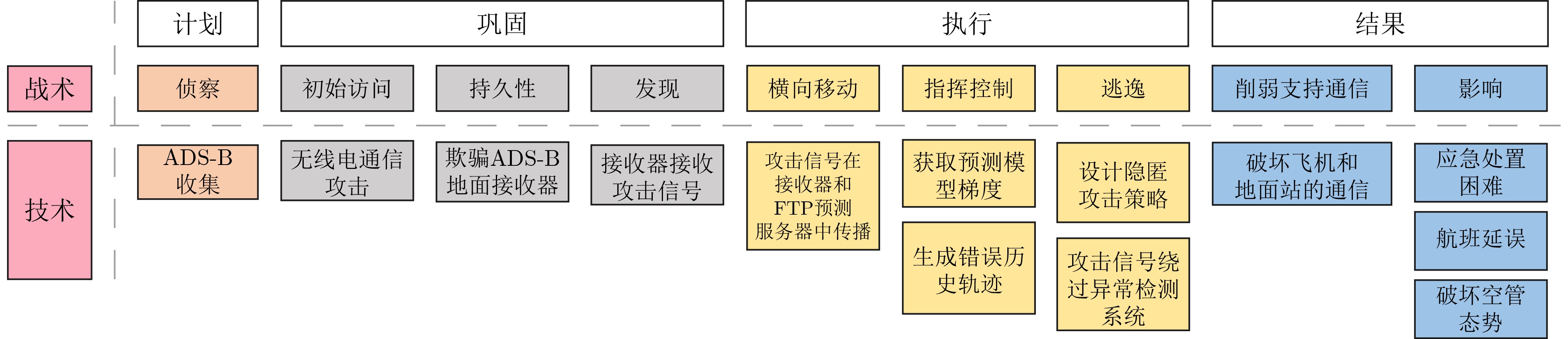
Significance The air traffic management system is a critical national infrastructure that impacts both aerospace security and the safety of lives and property. With the widespread adoption of information, networking, and intelligent technologies, the modern air traffic management system has evolved into a space-air-ground-sea integrated network, incorporating heterogeneous systems and multiple stakeholders. The network security of the system can no longer be effectively ensured by device redundancy, physical isolation, security by obscurity, or human-in-the-loop strategies. Due to the stringent requirements for aviation airworthiness certification, the implementation of new cybersecurity technologies is often delayed. New types of cyberattacks, such as advanced persistent threats and supply chain attacks, are increasingly prevalent. Vulnerabilities in both hardware and software, particularly in embedded systems and industrial control systems, are continually being exposed, widening the attack surface and increasing the number of potential attack vectors. Cyberattack incidents are frequent, and the network security situation remains critical. Progress The United States’ Next Generation Air Transportation System (NextGen), the European Commission’s Single European Sky Air Traffic Management Research (SESAR), and the Civil Aviation Administration of China have prioritized cybersecurity in their development plans for next-generation air transportation systems. Several countries and organizations, including the United States, Japan, China, the European Union, and Germany, have established frameworks for the information security of air traffic management systems. Although network and information security for air traffic management systems is gaining attention, many countries prioritize operational safety over cybersecurity concerns. Existing security specifications and industry standards are limited in addressing network and information security. Most of them focus on top-level design and strategic directions, with insufficient attention to fundamental theories, core technologies, and key methodologies. Current review literature lacks a comprehensive assessment of assets within air traffic management systems, often focusing only on specific components such as aircraft or airports. Furthermore, research on aviation information security mainly addresses traditional concerns, without fully considering the intelligent and dynamic security challenges facing next-generation air transportation systems. Conclusions This paper comprehensively examines the complexity of the cybersecurity ecosystem in air traffic management systems, considering various entities such as electronic-enabled aircraft, communication, navigation, Surveillance/Air Traffic Management (CNS/ATM), smart airports, and intelligent computing. It focuses on asset categorization, information flow, threat analysis, attack modeling, and defense mechanisms, integrating dynamic flight phases to systematically review the current state of cybersecurity in air traffic management systems. Several scientific issues are identified that must be addressed in constructing a secure ecological framework for air traffic management. Based on the Adversarial Tactics, Techniques, and Common Knowledge (ATT&CK) model, this paper analyzes typical attack examples related to the four ecological entities (Figs. 7, 9, 12, and 14) and constructs an ATT&CK matrix for air traffic management systems (Fig. 15). Additionally, with the intelligent development goal of next-generation air transportation systems as a guide, ten typical applications of intelligent air traffic management are outlined (Fig. 13, Table 11), with a systematic analysis of the attack patterns and defense mechanisms of their intelligent algorithms (Tables 12, 13). These findings provide theoretical references for the development of smart civil aviation and the assurance of cybersecurity in China. Prospects Currently, the cybersecurity ecosystem of air traffic management systems is highly complex, with unclear mechanisms, indistinct boundaries for cybersecurity assets, and incomplete security assurance requirements. Moreover, there is a lack of comprehensive, systematic, and holistic cybersecurity design and defense mechanisms, which limits the ability to counter various subjective, human-driven, and emerging types of malicious cyberattacks. This paper highlights key research challenges in areas such as dynamic cybersecurity analysis, attack impact propagation modeling, human-in-the-loop cybersecurity analysis, and distributed intrusion detection systems. Cybersecurity analysis of air traffic management systems should be conducted within the dynamic operational environment of a space-air-ground-sea integrated network, accounting for the cybersecurity ecosystem and analyzing it across different spatial and temporal dimensions. As aircraft are cyber-physical systems, cybersecurity threat analysis should focus on the interrelated propagation mechanisms between security and safety, as well as their cascading failure models. Furthermore, humans serve as the last line of defense in cybersecurity. When performing threat modeling and risk assessment for avionics systems, it is crucial to fully incorporate “human-in-the-loop” characteristics to derive comprehensive and objective conclusions. Finally, the design, testing, certification, and updating of civil aviation avionics systems are constrained by strict airworthiness requirements, preventing the rapid implementation of advanced cybersecurity technologies. Distributed anomaly detection systems, however, currently represent an effective technical approach for combating cyberattacks in air traffic management systems.