

Heterogeneous Task Cooperative Dispatch Scheduling Architecture of Networked Radar for Saturation Attack Air Defense Early Warning
-
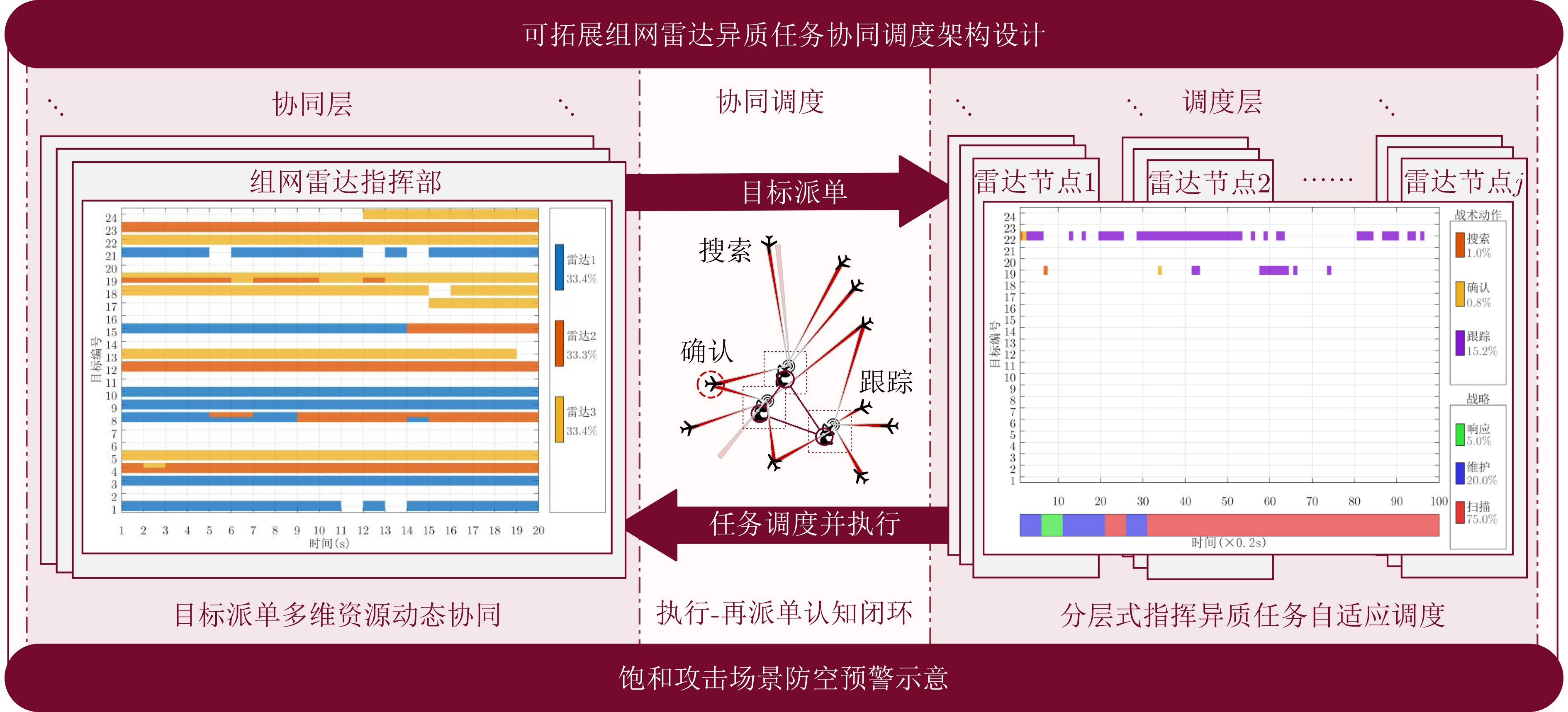
摘要: 面对无人机集群和智能巡飞弹等大规模、高速度饱和攻击威胁带来的海量、突发且异质预警任务的严峻挑战,如何依托组网雷达设计可拓展的协同调度架构,释放防空预警体系抗饱和攻击潜力亟待解决。针对现有架构动态协同僵化和异质任务调度能力不足等局限,该文深入分析饱和攻击场景多雷达多目标多任务调度难题,将非凸的协同调度问题解耦为多维资源动态协同和自适应异质任务调度多阶段决策过程,通过针对性引入派单机制和分层强化学习,以可拓展性为目标提出了一种决策层次上融合了集中式动态目标分配和分布式异质任务调度的混合架构,并具体设计了执行-再派单认知闭环、目标派单算法和分层式指挥调度方法。仿真表明所提架构面对大规模高速度饱和攻击时,能实时动态协同组网雷达以调度搜索、确认和跟踪三类异质预警任务,并在适用处理规模、环境自适应能力、长期调度能力、可拓展性和可解释性等方面具有改进。Abstract:
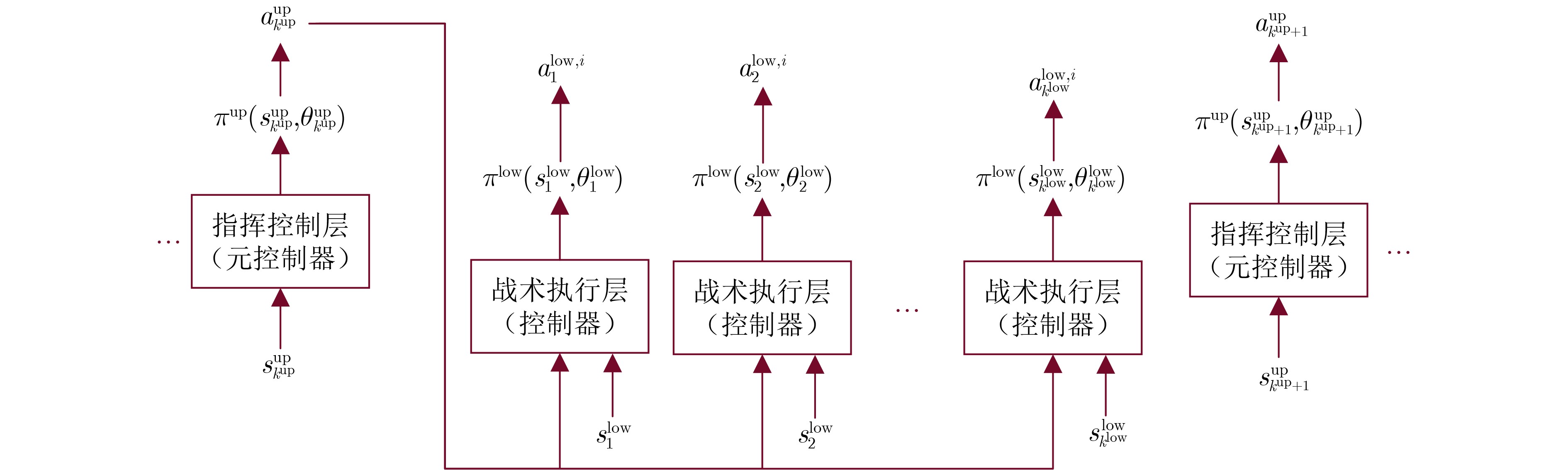
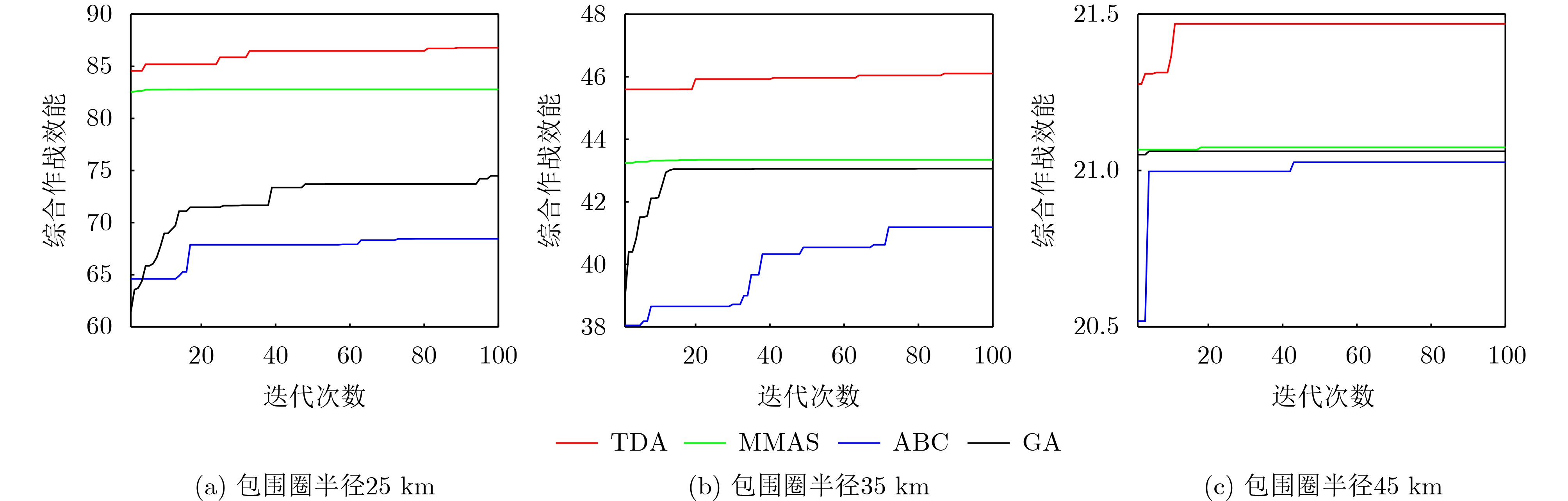
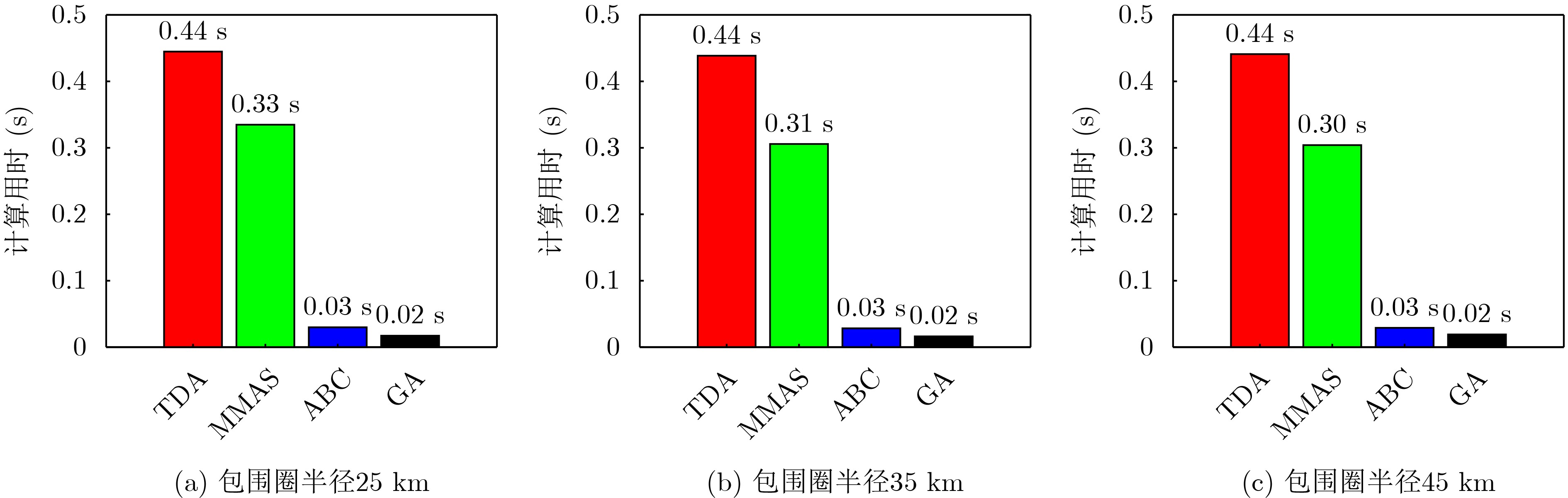
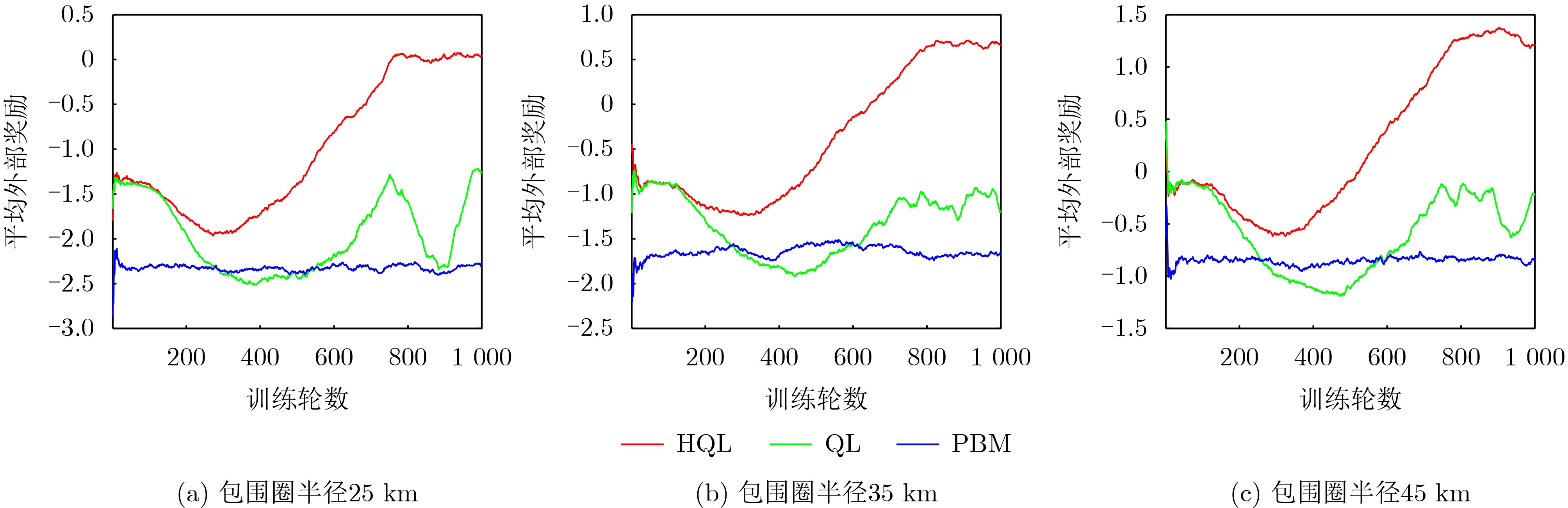
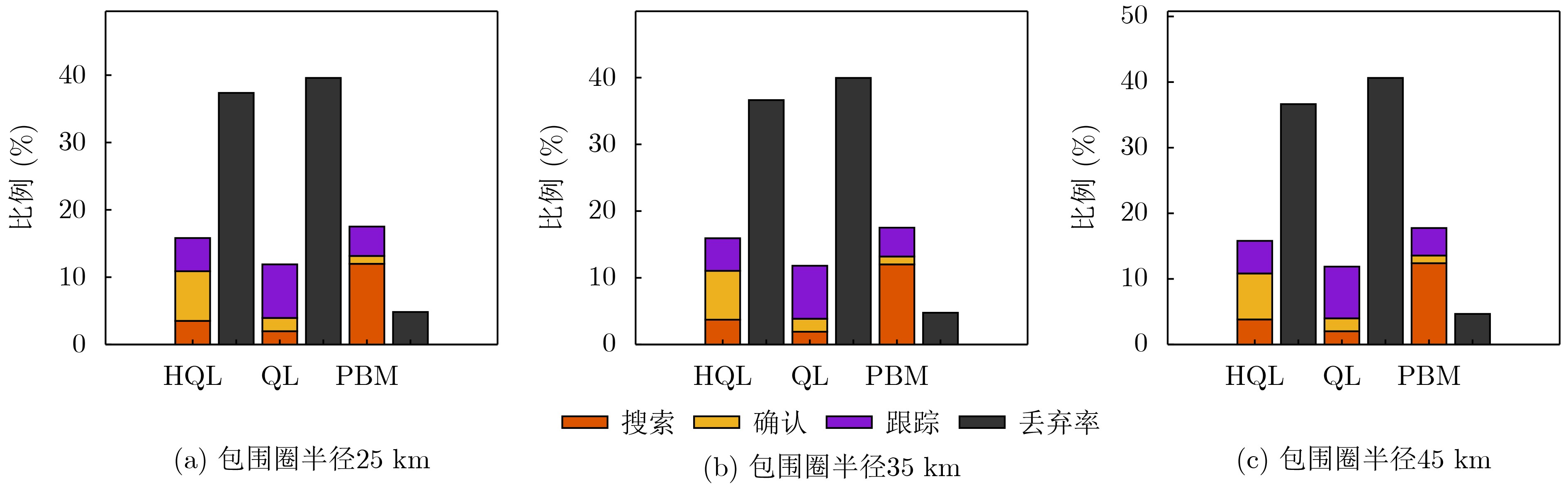
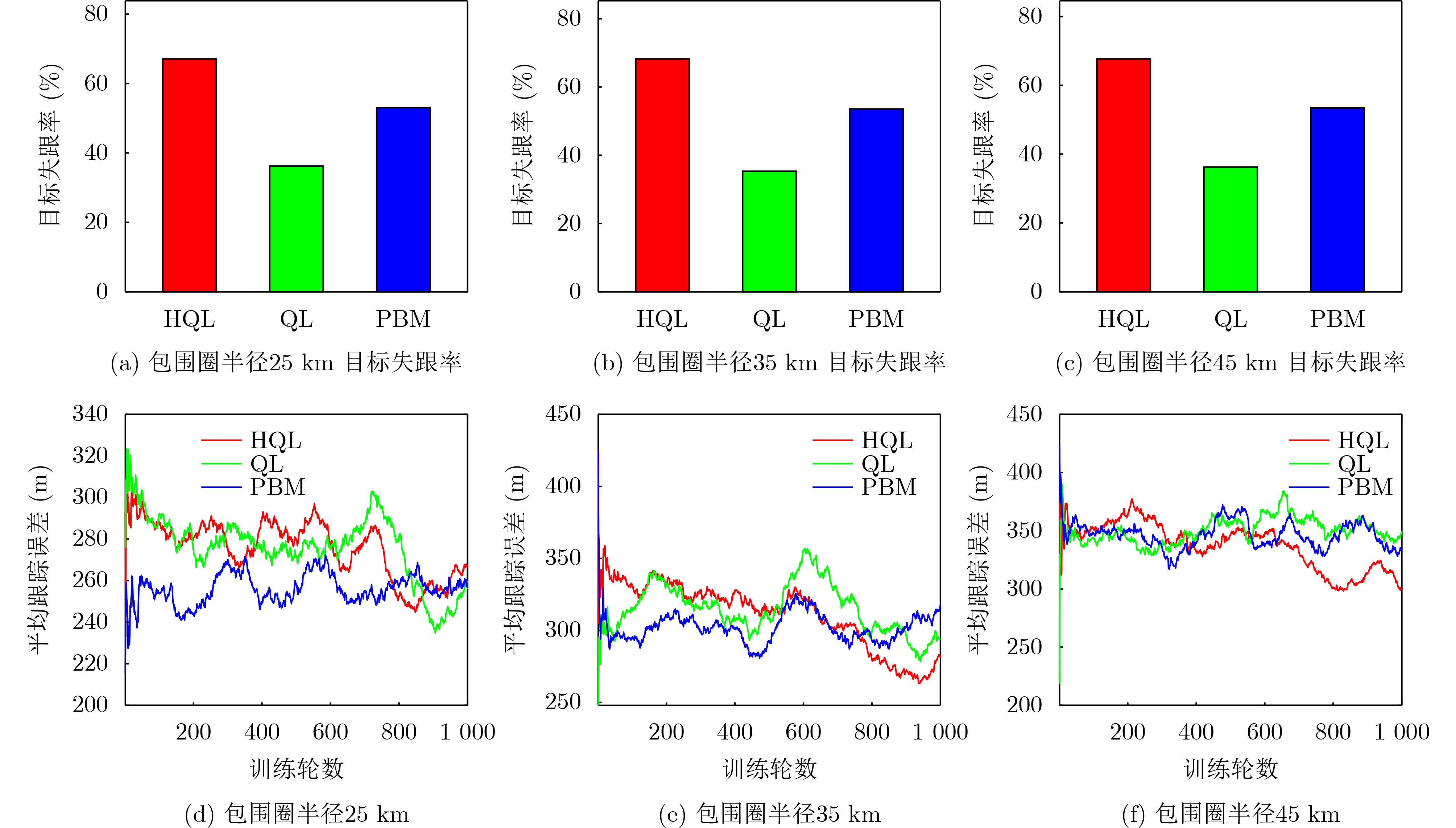
Objective To address the severe challenges of UAV swarm and intelligent loitering missile saturation attacks bringing massive, sudden, and heterogeneous early warning tasks, designing a scalable networked-radar-based collaborative scheduling architecture is critical for maximizing air defense early warning potential. Overcoming existing limitations like rigid dynamic collaboration and inadequate heterogeneous task scheduling, this paper decouples the non-convex collaborative scheduling problem into a multi-stage decision process of multi-dimensional dynamic resource collaboration and adaptive heterogeneous task scheduling, and, by introducing a dispatching mechanism and hierarchical reinforcement learning, proposes a hybrid architecture integrating network-level centralized dynamic target allocation and node-level distributed scheduling with scalability as the design goal. The architecture is specifically realized through an execution-redispatching cognitive closed-loop encompassing environmental perception, network collaboration, node scheduling, task execution, and target re-dispatching, together with a target dispatching algorithm and a hierarchical command-and-scheduling method, resolving multi-radar, multi-target, and multi-task scheduling dilemmas in saturation scenarios. Methods Collaborative scheduling is initially decoupled into dispatch-centric network-level multi-dimensional resource collaboration and hierarchical-command-centric adaptive node-level scheduling. The environmental perception layer establishes a fidelity model utilizing the Bayesian Cramér-Rao Lower Bound (BCRLB) and radar detection probability to jointly evaluate target threats and radar states. Subsequently, the network collaboration layer references a dispatching mechanism, dynamically allocating targets via an adaptively weighted dispatching model based on quantified combat effectiveness and constructing the scalable execution-redispatching cognitive closed-loop. To solve the ensuing large-scale, nonlinear, multi-constraint generalized bipartite graph matching problem, the proposed Target Dispatch Algorithm (TDA), an MMAS variant incorporating feasibility rule constraint handling, provides a constructive solution. The node scheduling layer then references Hierarchical Q-Learning (HQL), utilizing a serial dual Q-table engineering implementation for distributed heterogeneous task scheduling. Addressing the massive multi-constraint job-shop scheduling problem, a hierarchical mechanism uses task proportion control as a sub-goal, translating upper-level operational intent into specific lower-level beam dwells for the adaptive, long-term, and interpretable execution of intertwined heterogeneous tasks. Results and Discussions A simulated point-defense scenario against swarm or missile saturation attacks was designed, deploying three networked isomorphic S-band medium-range phased array radars against 200 high-speed maneuvering targets. For network collaboration, the proposed Target Dispatch Algorithm (TDA) employs a hierarchical solving mechanism with feasibility rule constraints, replacing traditional penalty functions. Leveraging model prior information, TDA demonstrates superior scheme quality and convergence speed compared to the Max-Min Ant System (MMAS), Artificial Bee Colony (ABC), and Genetic Algorithm (GA) ( Fig.3 ). Despite increased computational complexity, the calculation time of TDA remains strictly within the dispatching cycle, enhancing scheme quality at a millisecond-level cost while ensuring wartime real-time compliance (Fig.4 ). For node scheduling, the proposed Hierarchical Q-Learning (HQL) guarantees policy consistency via macro/micro-step decisions. Aided by an internal dense transfer reward environment, HQL demonstrates superior long-term policy quality and learning efficiency compared to the Q-Learning (QL) and the Priority-Based Method (PBM) (Fig.5 ). Utilizing a hierarchical, serial dual Q-table structure, HQL maintains balanced task proportions, maximizing combat effectiveness while improving resource utilization (Fig.6 ). Further, target loss rate and mean tracking error confirm that HQL achieves the lowest mean tracking error by concentrating resources on high-quality tracking tasks, despite a higher target loss rate, validating superior long-term scheduling performance (Fig.7 ).Conclusions The proposed hybrid architecture integrating network-level centralized dynamic target allocation and node-level distributed heterogeneous task scheduling effectively counters swarm saturation attacks by overcoming limitations of dynamic coordination rigidity and inadequate heterogeneous task scheduling capability. By dynamically coordinating networked radars in real-time for scheduling of search, confirmation, and tracking tasks during large-scale, high-speed saturation attacks, the architecture releases the defensive potential of early warning network. Simulations validate its improvement in applicable processing scale, environmental adaptability, long-term scheduling capability, scalability, and interpretability. Future research will explore online learning to mitigate offline-training-online-deployment model distortion, or extend the architecture to integrate weapon-target assignment for unified early warning and fire control defense systems. -
表 1 归一化作战效能函数定义
序号 命名 定义 1 波束指向调整代价 $ U_{k,1}^{j}(j)=\dfrac{\left(\mathbf{p}_{k}^{j}-\mathbf{p}_{k}^{i}\right)\cdot \mathbf{\dot{p}}_{k}^{i}}{\left|\left|\mathbf{p}_{k}^{j}-\mathbf{p}_{k}^{i}\right|\right|\cdot \left|\left|\mathbf{\dot{p}}_{k}^{i}\right|\right|}-1 $ 2 资源充分利用收益 $ U_{k,2}^{j}(i)=\max \left(\min \left(\dfrac{\displaystyle\sum \limits_{i}x_{k}^{i,j}}{{N}_{\text{J}}}\right)\right) $ 3 跟踪精度收益 $ U_{k,3}^{j}(i)=1-\dfrac{\eta _{k}^{i,j}}{\underset{i}{\max }\eta _{k}^{i,j}} $ 4 多站协同受益 $ U_{k,1}^{i}(j)=\dfrac{1}{\pi }\underset{j\neq j'}{\max }\left(\arccos \left(\dfrac{\mathbf{p}_{k}^{j}-\mathbf{p}_{k}^{i}}{\left|\left|\mathbf{p}_{k}^{j}-\mathbf{p}_{k}^{i}\right|\right|}\cdot \dfrac{\mathbf{p}_{k}^{j'}-\mathbf{p}_{k}^{i}}{\left|\left|\mathbf{p}_{k}^{j'}-\mathbf{p}_{k}^{i}\right|\right|}\right)\right) $ 5 超负荷代价 $ U_{k,4}^{j}(j)=-\max \left(0,\dfrac{\displaystyle\sum \limits_{i}x_{k}^{i,j}-{N}_{\text{J}}}{{N}_{\text{J}}}\right) $ 6 高威胁目标战术倾斜收益 $ U_{k,2}^{i}(j)=\dfrac{P_{k}^{i}}{\underset{i}{\max }P_{k}^{i}} $  下载: 导出CSV
下载: 导出CSV
表 2 目标派单算法表
输入:综合作战效能矩阵$ {\mathbf{U}}_{k} $,信息素权重$ \alpha $、启发式信息权重$ \beta $、挥发率$ \rho $、信息素常数$ Q $、最大信息素$ {\tau }_{\text{min}} $和最小信息素$ {\tau }_{\text{max}} $、雷达负
载上限$ {N}_{\text{J}} $和目标覆盖上限$ {N}_{\text{I}} $输出:全局最优目标派单方案$ \hat{X}_{k}^{n} $ (1)初始化最大迭代次数$ K $、种群规模$ N $、信息素矩阵$ \tau _{0}^{i,j}={\tau }_{\max } $和综合作战效能$ J(X_{0}^{n})=0 $ (2)目标覆盖层求解,随机顺序遍历目标,筛选未满载、处于威力范围内且过门限的雷达并计算路径转移概率$ P_{n,k}^{i,j} $,确保满足零漏警硬约束 (3)多站协同层求解,再次随机顺序遍历目标,剔除已派单雷达,筛选剩余资源可用雷达并派单,计算观测几何增益 (4)针对每个蚂蚁的解$ X_{\hat{k}}^{n} $评估综合作战效能$ J\left(X_{\hat{k}}^{n}\right) $,更新最优解$ \hat{X}_{\hat{k}}^{n} $并找到该蚂蚁 (5)所有信息素进行挥发 (6)仅允许找到最优解$ \hat{X}_{\hat{k}}^{n} $的蚂蚁更新信息素 (7)所有信息素限幅$ [{\tau }_{\min },{\tau }_{\max }] $ (8)若达到最大迭代次数则输出$ \hat{X}_{k}^{n} $,否则转至 (2)
下载: 导出CSV
表 3 指挥规划层任务池定义
编号 命名 预期任务比例 基础传递奖励设计及说明 1 响应 搜索10%
确认10%
跟踪80%跟踪+8鼓励跟踪
失跟-8更重视失跟惩罚
搜索+1允许新增个别搜索
确认+1允许新增个别确认
其他情况-0.1防止怠工2 维护 搜索20%
确认20%
跟踪60%跟踪+6维护现有跟踪
失跟-6失跟予以惩罚
搜索+2允许新的搜索
确认+2允许新的确认
其他情况-0.1防止怠工3 扫描 搜索40%
确认40%
跟踪20%跟踪+2允许继续跟踪
失跟-2允许取消跟踪
确认+4鼓励确认
搜索+4鼓励搜索
其他情况-0.1防止怠工
下载: 导出CSV
表 4 战术执行层任务池定义
编号 命名 时间消耗 功率消耗 基础任务紧急度 任务依赖关系 1 搜索 5% 5% 5 第一次发现目标时
搜索后未及时确认
确认后未及时跟踪
失跟后未及时确认2 确认 10% 10% 10 搜索后且处于确认有效期内
失跟后但处于确认有效期内3 跟踪 20% 20% 20 确认后处于跟踪有效期内
未失跟时
下载: 导出CSV
表 5 基本实验参数设置
分量系数 符号 实验设定 分量系数 符号 实验设定 权重因子 $ {\alpha }_{\text{U}} $ 0.5 信噪比奖励系数 $ {\beta }_{\text{SNR}} $ 0.4 雷达自适应权重初值 $ {\beta }_{\text{T},0} $ 1.0 跟踪精度奖励系数 $ {\beta }_{\text{P}} $ -0.4 雷达自适应权重初值 $ {\beta }_{\text{R},0} $ 1.0 公平性惩罚系数 $ {\beta }_{\text{fair}} $ 0.2 目标自适应权重基准系数 $ {\beta }_{\text{T},\text{th}} $ 0.8 比例惩罚权重 $ {w}_{\text{radio}} $ 200 雷达自适应权重基准系数 $ {\beta }_{\text{R},\text{th}} $ 0.8 综合作战效能权重 $ {w}_{\text{base}} $ 10 自适应权重最大值 $ {\beta }_{\text{T,max}} $/$ {\beta }_{\text{R,max}} $ 1.0 过载惩罚权重 $ {w}_{\text{cap}} $ 0.5 自适应权重最小值 $ {\beta }_{\text{T,min}} $/$ {\beta }_{\text{R,min}} $ 0 漏警惩罚系数 $ {w}_{\text{miss}} $ 0.1 波束指向调整代价权重 $ {w}_{1} $ 0.25 加速度过程噪声 $ {Q}_{\text{a}} $ 0.9 资源充分利用收益权重 $ {w}_{2} $ 0.25 转弯过程噪声 $ {Q}_{\text{w}} $ 0.2 跟踪精度收益权重 $ {w}_{3} $ 0.25 测距噪声 $ {R}_{\text{r}} $ 120 多站协同收益权重 $ {w}_{4} $ 0.5 测角噪声 $ {R}_{\theta } $ $ {(0.5\cdot \dfrac{\pi }{180})}^{2} $ 超负荷代价权重 $ {w}_{5} $ 0.25 测速噪声 $ {R}_{\text{v}} $ 5 高威胁目标战术倾斜权重 $ {w}_{6} $ 0.5 PBM资源加权 $ {\beta }_{\text{PBM}} $ 300 雷达自适应权重更新系数 $ {\gamma }_{\text{R}} $ 0.12 窗口大小 $ W $ 10 目标自适应权重更新系数 $ {\gamma }_{\text{T}} $ 0.12 失跟计数阈值 $ {N}_{\text{lost}} $ 5 迎击距离优先级权重 $ {w}_{\text{dist}} $ 0.4 蛇形机动幅度 $ {A}_{\text{snake}} $ [0.05,0.15] 角速度优先级权重 $ {w}_{\text{mea}} $ 0.3 蛇形机动频率 $ {f}_{\text{snake}} $ [0.1,0.3] 跟踪精度优先级权重 $ {w}_{\text{unc}} $ 0.3 来袭方向扰动范围 $ {\theta }_{\text{coming}} $ $ \dfrac{\pi }{4} $ 高优先级阈值 $ {P}_{\text{high}} $ 0.7 初始协方差 $ {\mathbf{P}}_{0} $ [500,500,100$ {(10\cdot \dfrac{\pi }{180})}^{2} $,0.1] 中优先级阈值 $ {P}_{\text{medium}} $ 0.4 跟踪精度阈值 $ {y}_{{{e}_{\text{th}}}} $ 50
下载: 导出CSV
表 6 求解算法对比实验参数设置
参数类型 TDA MMAS ABC GA 种群规模$ N $ 30/100 30/100 30/100 30/100 最大迭代$ K $ 100 100 100 100 信息素权重$ {\beta }_{\tau } $ 1.0 1.0 - - 启发式权重$ {\beta }_{\text{U}} $ 2.0 2.0 - - 挥发率$ \rho $ 0.1 0.1 - - 信息素常数$ Q $ 100 100 - - 特有参数 信息素最大值10 信息素最大值10 停滞阈值5 交叉率0.8 信息素最小值0.1 信息素最小值0.1 观察蜂0.5 变异率0.1
下载: 导出CSV
表 7 调度方法对比实验参数设置
参数类型 HQL QL PBM 状态空间$ s $ 上层 1331 /下层363121 - 动作空间$ a $ 上层3/下层4 4 3 训练轮数$ e $ 1000 1000 - 每轮步数$ n $ 100 100 学习率$ \alpha $ 上层0.05/下层0.1 0.1 - 折扣因子$ \gamma $ 0.85 0.85 - 探索率$ \varepsilon $ 1.1至0.005 1.1至0.005 - 算法类型 指挥规划-战术执行双层Q表 单层Q表 最高优先级优先调度
下载: 导出CSV
-
[1] YAN Junkun, JIAO Hao, PU Wenqiang, et al. Radar sensor network resource allocation for fused target tracking: A brief review[J]. Information Fusion, 2022, 86/87: 104–115. doi: 10.1016/j.inffus.2022.06.009. [2] 易伟, 袁野, 刘光宏, 等. 多雷达协同探测技术研究进展: 认知跟踪与资源调度算法[J]. 雷达学报, 2023, 12(3): 471–499. doi: 10.12000/JR23036.YI Wei, YUAN Ye, LIU Guanghong, et al. Recent advances in multi-radar collaborative surveillance: Cognitive tracking and resource scheduling algorithms[J]. Journal of Radars, 2023, 12(3): 471–499. doi: 10.12000/JR23036. [3] 丁建江, 许红波, 周芬. 雷达组网技术[M]. 北京: 国防工业出版社, 2017.DING Jianjiang, XU Hongbo, and ZHOU Fen. The Technology of Netted Radar System[M]. Beijing: National Defense Industry Press, 2017. (查阅网上资料, 未找到本条文献页码信息, 请补充). [4] 时晨光, 蒋泽宇, 严牧, 等. 针对组网雷达的无人机集群航迹欺骗综合误差分析[J]. 电子与信息学报, 2024, 46(12): 4451–4458. doi: 10.11999/JEIT240289.SHI Chenguang, JIANG Zeyu, YAN Mu, et al. Comprehensive error in UAV cluster trajectory deception for networked radar[J]. Journal of Electronics & Information Technology, 2024, 46(12): 4451–4458. doi: 10.11999/JEIT240289. [5] 吴桐, 亓统帅, 谢伟朋. 无人机集群反制技术研究[J]. 空天防御, 2025, 8(1): 17–23. doi: 10.3969/j.issn.2096-4641.2025.01.003.WU Tong, QI Tongshuai, and XIE Weipeng. Research on anti-UAV cluster technology[J]. Air & Space, 2025, 8(1): 17–23. doi: 10.3969/j.issn.2096-4641.2025.01.003. [6] 何伟. 高机动超近程防空作战中的电火协同拦截决策技术[J]. 指挥控制与仿真, 2025, 47(1): 77–83. doi: 10.3969/j.issn.1673-3819.2025.01.010.HE Wei. Electronic and firepower collaborative interception decision technology in high mobility ultra short range air defense operations[J]. Command Control & Simulation, 2025, 47(1): 77–83. doi: 10.3969/j.issn.1673-3819.2025.01.010. [7] 何友, 王国宏, 陆大䋮, 等. 多传感器信息融合及应用[M]. 2版. 北京: 电子工业出版社, 2007.HE You, WANG Guohong, LU Dajin, et al. Multisensor Information Fusion with Application[M]. 2nd ed. Beijing: Publishing House of Electronics Industry, 2007. (查阅网上资料, 未找到本条文献页码信息, 请补充). [8] 杨露菁, 余华. 多源信息融合理论与应用[M]. 北京: 北京邮电大学出版社, 2011.YANG Lujing and YU Hua. Theory and Application of Multi-Source Information Fusion[M]. Beijing: Beijing University of Posts and Telecommunications Press, 2011. (查阅网上资料, 未找到本条文献页码信息及英文翻译, 请确认). [9] 薛琛衍. 数字阵列雷达资源管理研究[D]. [博士论文], 南京航空航天大学, 2023. doi: 10.27239/d.cnki.gnhhu.2023.000104.XUE Chenyan. Research on resource management of digital array radar[D]. [Ph. D. dissertation], Nanjing University of Aeronautics and Astronautics, 2023. doi: 10.27239/d.cnki.gnhhu.2023.000104. [10] 毕增军, 徐晨曦, 张贤志, 等. 相控阵雷达资源管理技术[M]. 北京: 国防工业出版社, 2016.BI Zengjun, XU Chenxi, ZHANG Xianzhi, et al. Phased Array Radar Resource Management Technology[M]. Beijing: National Defense Industry Press, 2016. (查阅网上资料, 未找到本条文献页码信息及英文翻译, 请确认). [11] 熊奎. 多雷达联盟博弈智能协同跟踪理论与方法研究[D]. [博士论文], 电子科技大学, 2024. doi: 10.27005/d.cnki.gdzku.2024.000037.XIONG Kui. Research on theory and method of multi-radar coalition game intelligent cooperative tracking[D]. [Ph. D. dissertation], University of Electronic Science and Technology of China, 2024. doi: 10.27005/d.cnki.gdzku.2024.000037. [12] 蒋李兵, 杨庆伟, 郑舒予, 等. 基于拍卖理论的组网雷达多轨道目标ISAR成像资源分配算法[J]. 系统工程与电子技术, 2025, 47(1): 81–93. doi: 10.12305/j.issn.1001-506X.2025.01.09.JIANG Libing, YANG Qingwei, ZHENG Shuyu, et al. Multi-orbit targets ISAR imaging resource allocation algorithm for netted radar based on auction theory[J]. Systems Engineering and Electronics, 2025, 47(1): 81–93. doi: 10.12305/j.issn.1001-506X.2025.01.09. [13] PIEZZO M, AUBRY A, BUZZI S, et al. Non-cooperative code design in radar networks: A game-theoretic approach[J]. EURASIP Journal on Advances in Signal Processing, 2013, 2013(1): 63. doi: 10.1186/1687-6180-2013-63. [14] 李浩情, 余点, 潘常春, 等. 基于模型知识融合的图神经网络多雷达协同任务调度算法[J]. 雷达学报, 2025, 14(2): 470–485. doi: 10.12000/JR24222.LI Haoqing, YU Dian, PAN Changchun, et al. Multiradar collaborative task scheduling algorithm based on graph neural networks with model knowledge embedding[J]. Journal of Radars, 2025, 14(2): 470–485. doi: 10.12000/JR24222. [15] 杜永浩, 张本奎, 吴健, 等. 大规模遥感卫星智能任务调度方法研究进展[J]. 电子与信息学报, 2025, 47(12): 5033–5047. doi: 10.11999/JEIT251038.DU Yonghao, ZHANG Benkui, WU Jian, et al. Survey on intelligent methods for large-scale remote sensing satellite scheduling[J]. Journal of Electronics & Information Technology, 2025, 47(12): 5033–5047. doi: 10.11999/JEIT251038. [16] 杜永浩, 黎磊, 徐世龙, 等. 基于智能优化算法引擎的可演进星群智能任务规划[J]. 电子与信息学报, 2025, 47(6): 1645–1657. doi: 10.11999/JEIT240974.DU Yonghao, LI Lei, XU Shilong, et al. Evolutionary optimization for satellite constellation task scheduling based on intelligent optimization engine[J]. Journal of Electronics & Information Technology, 2025, 47(6): 1645–1657. doi: 10.11999/JEIT240974. [17] JIN Biao, KUANG Xiaofei, LIU Shujin, et al. Joint allocation of transmit power and signal bandwidth for distributed cognitive tracking radar network using cooperative game[J]. Digital Signal Processing, 2023, 135: 103964. doi: 10.1016/j.dsp.2023.103964. [18] 焦浩, 严俊坤, 郝佳, 等. 面向多机动目标的资源分配与精细化跟踪算法[J]. 雷达学报, 2026, 15(1): 292–306. doi: 10.12000/JR25037.JIAO Hao, YAN Junkun, HAO Jia, et al. Resource allocation and precise tracking algorithm for multiple maneuvering targets[J]. Journal of Radars, 2026, 15(1): 292–306. doi: 10.12000/JR25037. [19] 周琳, 王祎, 朱效洲, 等. 面向反导预警作战的多传感器任务分配拍卖方法[J]. 现代雷达, 2023, 45(6): 42–50. doi: 10.16592/j.cnki.1004-7859.2023.06.006.ZHOU Lin, WANG Yi, ZHU Xiaozhou, et al. Multi-sensor task assignment auction method for anti-missile Early warning campaign[J]. Modern Radar, 2023, 45(6): 42–50. doi: 10.16592/j.cnki.1004-7859.2023.06.006. [20] 崔莉莉. 基于蚁群算法的武器—目标分配问题研究[D]. [硕士论文], 上海交通大学, 2011.CUI Lili. Ant colony algorithm for solving the weapon-target assignment problem[D]. [Master dissertation], Shanghai Jiaotong University, 2011. [21] 孙玉洁, 苏波, 段乐毅, 等. 空地协同侦察任务派单算法研究[J]. 兵工学报, 2024, 45(S2): 317–328. doi: 10.12382/bgxb.2024.0319.SUN Yujie, SU Bo, DUAN Leyi, et al. A reconnaissance task allocation algorithm for air-ground heterogeneous unmanned system[J]. Acta Armamentarii, 2024, 45(S2): 317–328. doi: 10.12382/bgxb.2024.0319. [22] KULKARNI T D, NARASIMHAN K R, SAEEDI A, et al. Hierarchical deep reinforcement learning: Integrating temporal abstraction and intrinsic motivation[C]. Advances in Neural Information Processing Systems 29: Annual Conference on Neural Information Processing Systems 2016, Barcelona, Spain, 2016. [23] 毛滔, 蔺美青, 周建飞. 地面防空预警雷达探测概率仿真模型研究[J]. 空军预警学院学报, 2013, 27(6): 430–434. doi: 10.3969/j.issn.2095-5839.2013.06.010.MAO Tao, LIN Meiqing, and ZHOU Jianfei. Simulation model for detection probability of ground air defense Early-warning radar[J]. Journal of Air & Space Early Warning Research, 2013, 27(6): 430–434. doi: 10.3969/j.issn.2095-5839.2013.06.010. [24] FANG Yuyuan, WEI Shaopeng, ZHANG Lei, et al. Online emission policy selection for radar antijamming using bandit-optimized policy search[J]. IEEE Transactions on Aerospace and Electronic Systems, 2024, 60(3): 3132–3147. doi: 10.1109/TAES.2024.3358793. [25] MAHAFZA B R. Radar Systems Analysis and Design Using MATLAB[M]. Boca Raton: CRC Press, 2005. (查阅网上资料, 未找到本条文献页码信息, 请补充). [26] WEI Yuting, JI Zhe, WU Sheng, et al. Hierarchical reinforcement learning for task scheduling in space-air integrated edge computing networks[J]. IEEE Internet of Things Journal, 2025, 12(23): 49722–49736. doi: 10.1109/JIOT.2025.3605153. -

 下载:
下载:


图(7) / 表(8)
计量
- 文章访问数: 24
- HTML全文浏览量: 8
- PDF下载量: 0
- 被引次数: 0
