

A general evaluation framework for mission planning algorithms for remote sensing satellite constellations
-
摘要: 当前卫星遥感已成为国土资源普查和防灾减灾的关键工具,国家经济发展对遥感的需求也快速增长,卫星数量规模不断扩展,遥感星群资源的任务规划显得尤为重要,星群任务规划算法面临从单星静态调度到星群(包含多个异构混合星座)动态协同的范式跃迁。星群任务规划需要根据各颗卫星轨道分布、载荷性能和约束条件,综合考虑任务位置分布、时效频次等要求,为每颗卫星制定观测计划,实现星群整体观测效益最大化。然而当前学术界对遥感卫星星群任务规划算法测评尚未形成统一的量化标准,不同研究涉及的卫星规模从数十颗到数百颗不等,任务数量从数百到数千跨度巨大,这使得跨论文的性能比较几乎不可能。本文提出面向遥感卫星星群任务规划算法的通用测评框架 “Remote Sensing Constellation Mission Planning Benchmark (RSCMP-Bench)”,主要贡献体现为三个方面: 多场景标准任务库、多维效能评估指标体系、仿真与评测平台。通过开展基准测试,验证了RSCMP-Bench测试流程的可行性、可复现性及其对算法性能评估的区分能力。测评框架及运行环境已发布在天智杯在线平台,RSCMP-Bench旨在为领域建立类似ImageNet之于计算机视觉、GLUE之于自然语言处理的统一基准,推动卫星任务规划算法从“孤立实验”走向“标准化竞技”,最终加速面向下一代智能遥感星群的规划技术突破。Abstract:
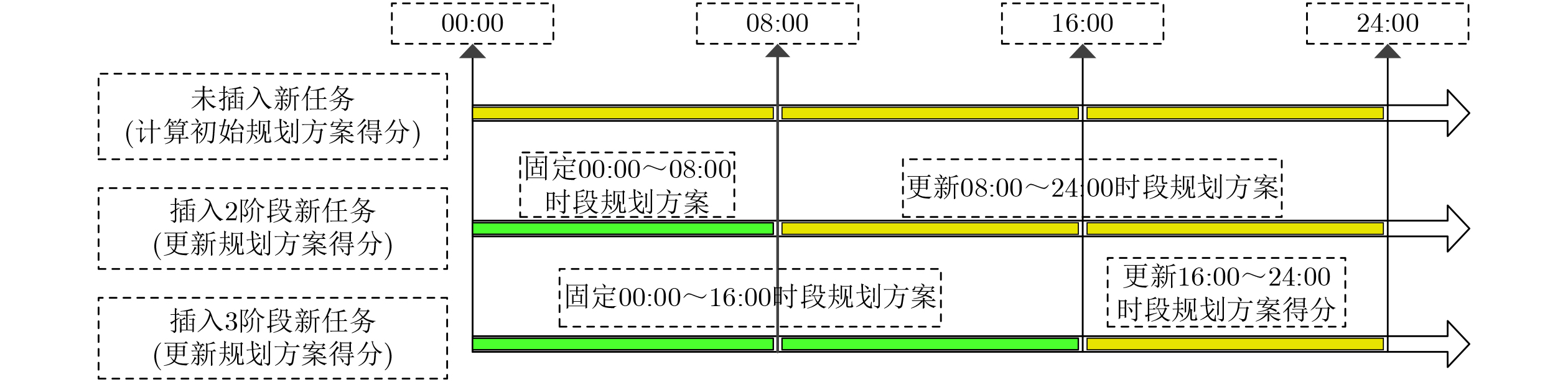
Objective The rapid proliferation of remote sensing satellites has shifted mission planning from single-satellite static scheduling to large-scale dynamic coordination of heterogeneous constellations. Despite algorithmic advances, the field lacks standardized benchmarks—existing studies use private datasets, oversimplified metrics (mainly task completion rate), and idealized simulations that ignore real constraints like attitude maneuvers, illumination, and dynamic task insertions. This fragmentation prevents cross-paper comparison and hinders operational translation. To bridge this gap, we propose RSCMP-Bench, a general, open, reproducible evaluation framework serving as a unified community standard, analogous to ImageNet for vision and GLUE for NLP. Methods RSCMP-Bench has three pillars: 1)Multi-scenario task library: 300 standardized scenarios across three difficulty levels (Low/Medium/High, 100 each). Satellite counts range from 30 (Low) to 200 (High); task numbers from 50 to over 500. All scenarios use public TLE data and explicitly model constraints: optical satellites require minimum solar elevation, SAR satellites have incidence angle ranges and thermal control intervals. Task types include point and area targets. 2)Multi-dimensional evaluation: Basic Performance layer (completion rate, weighted completion, average response delay, time utilization) and a Dynamic Adaptability layer using a multi-stage rolling horizon with random task insertions. The Dynamic Adaptability Score averages post-insertion completion rate relative to baseline; Dynamic Response Efficiency measures gain per replanning time. A composite RSCMP-Bench Score is also provided. 3)Simulation Evaluation Platform: Client-server architecture with SGP4 propagator, algorithm adapters, two-stage constraint verification, intelligent scenario generator, and visualization. Deployed at https://www.tianzhibei.com, it has supported a national competition with over 80 teams. Results and Discussions Baseline experiments (Random Scheduler vs. Priority Greedy) validate feasibility, discriminative power, and reproducibility. Random Scheduler achieved very low completion rates (7.3% on Low, 3.8% on Medium, 1.9% on High), confirming extreme sparsity of the feasible solution space. Priority Greedy performed substantially better but showed clear degradation: completion rates dropped from 76.1% (Low) to 63.7% (Medium) to 49.2% (High), demonstrating that high-difficulty scenarios challenge even reasonable heuristics and leave ample room for advanced algorithms. The dynamic adaptability protocol successfully quantified robustness under unexpected task insertions—a metric absent from static evaluations. The two-stage constraint verification rejected all invalid plans, generating detailed error reports for debugging. Conclusions RSCMP-Bench establishes the first unified, fair, reproducible benchmark for remote sensing constellation mission planning. By providing a public library of 300 standardized scenarios, a multi-metric evaluation system (basic performance + dynamic adaptability), and a simulation platform with realistic constraints and automated scenario generation, it directly addresses the field’s long-standing “evaluation vacuum.” Baseline results confirm its discriminative power and reveal substantial challenges in large-scale dynamic scenarios. Inspired by ImageNet and GLUE, RSCMP-Bench aims to catalyze systematic, community-driven competition. The framework is already deployed at https://www.tianzhibei.com, and the authors invite the community to adopt and contribute, accelerating breakthroughs in intelligent planning for massive remote sensing constellations. -
表 1 任务场景设置
难度 资源普查点 资源普查区域 追加点 追加区域 光学卫星 SAR卫星 低 45 5 5 1 20 10 中 180 20 20 5 52 28 高 450 50 50 10 132 68  下载: 导出CSV
下载: 导出CSV
表 2 测评数据核心数据表及其字段说明
数据表 字段 类型 说明 卫星
星历geometry POINT 星下点经纬度(WGS84) time INTEGER 从UTC0点开始的秒数 altitude REAL 卫星高度(km) sun_elevation REAL 星下点太阳高度角(度) 点任务 mission_id TEXT 任务唯一标识符 geometry POINT 任务地理位置 priority INTEGER 优先级(1-10) frequency INTEGER 要求执行次数 min_interval REAL 最小观测间隔(小时) time_start INTEGER 最早可执行时间(秒) time_end INTEGER 最晚可执行时间(秒) 区域
任务mission_id TEXT 任务唯一标识符 geometry POLYGON 区域边界 area REAL 区域面积
(km2, EPSG:6933 )coverage_ratio REAL 要求覆盖率 priority INTEGER 优先级 time_start INTEGER 最早可执行时间(秒) time_end INTEGER 最晚可执行时间(秒) 卫星 satellite_id TEXT 卫星标识符 type TEXT optical/SAR swath REAL 幅宽(km) max_roll_left REAL 最大左侧摆角(度) max_roll_right REAL 最大右侧摆角(度) min_sun_elev REAL 最小太阳高度角(光学) min_inc_angle REAL 最小入射角(SAR) max_inc_angle REAL 最大入射角(SAR) resolution REAL 分辨率(m) min_on_time REAL 单次最小开机时长(秒) max_on_time_orbit REAL 单圈最大开机时长(秒) trans_time_0 REAL 0度侧摆机动时长(秒) trans_time_10 REAL 10度侧摆机动时长(秒) trans_time_20 REAL 20度侧摆机动时长(秒)
下载: 导出CSV
-
[1] 江碧涛. 我国空间对地观测技术的发展与展望[J]. 测绘学报, 2022, 51(7): 1153–1159. doi: 10.11947/j.AGCS.2022.20220199.JIANG Bitao. The development and prospect of China's space earth observation technology[J]. Acta Geodaetica et Cartographica Sinica, 2022, 51(7): 1153–1159. doi: 10.11947/j.AGCS.2022.20220199. [2] 康利鸿, 田菁, 江碧涛. 巨星座时代遥感卫星应用技术挑战与思考[J]. 遥感学报, 2024, 28(7): 1658–1666. doi: 10.11834/jrs.20233248.KANG Lihong, TIAN Jing, and JIANG Bitao. Challenges and research on remote sensing satellite application technology in the Giant Constellation Era[J]. National Remote Sensing Bulletin, 2024, 28(7): 1658–1666. doi: 10.11834/jrs.20233248. [3] DENG Jia, DONG Wei, SOCHER R, et al. ImageNet: A large-scale hierarchical image database[C]. Proceedings of 2009 IEEE Conference on Computer Vision and Pattern Recognition, Miami, USA, 2009: 248–255. doi: 10.1109/CVPR.2009.5206848. [4] WANG A, SINGH A, MICHAEL J, et al. GLUE: A multi-task benchmark and analysis platform for natural language understanding[C]. Proceedings of the 2018 EMNLP Workshop BlackboxNLP: Analyzing and Interpreting Neural Networks for NLP, Brussels, Belgium, 2018. doi: 10.18653/v1/W18-5446. [5] 天智杯人工智能挑战赛平台. 面向国土资源普查的智能任务规划算法比赛[EB/OL]. https://www.tianzhibei.com, 2024. (查阅网上资料,请核对网址与文献是否相符).Tianzhibei Online Platform. Intelligent mission planning algorithm competition for land resource surveying[EB/OL]. https://www.tianzhibei.com, 2024. (查阅网上资料,未找到对应的英文翻译,请确认). [6] 杜永浩, 张本奎, 吴健, 等. 大规模遥感卫星智能任务调度方法研究进展[J]. 电子与信息学报, 2025, 47(12): 5033–5047. doi: 10.11999/JEIT251038.DU Yonghao, ZHANG Benkui, WU Jian, et al. Survey on intelligent methods for large-scale remote sensing satellite scheduling[J]. Journal of Electronics & Information Technology, 2025, 47(12): 5033–5047. doi: 10.11999/JEIT251038. [7] 李庥甜, 王凌, 陈英武, 等. 基于自适应大邻域搜索的多场景多卫星任务规划方法[J]. 系统仿真学报, 2025, 37(7): 1836–1847. doi: 10.16182/j.issn1004731x.joss.25-0095.LI Xiutian, WANG Ling, CHEN Yingwu, et al. Multi-scenario multi-satellite mission planning method based on adaptive large neighborhood search[J]. Journal of System Simulation, 2025, 37(7): 1836–1847. doi: 10.16182/j.issn1004731x.joss.25-0095. [8] SHE Yucheng, YANG Zhi, and WANG Dandan. A study on adaptive multi-satellite mission allocation algorithm for efficient large-scale constellation planning[J]. Journal of Physics: Conference Series, 2025, 3083(1): 012002. doi: 10.1088/1742-6596/3083/1/012002. [9] HUANG Weiquan, WANG He, YI Dongbo, et al. A multiple agile satellite staring observation mission planning method for dense regions[J]. Remote Sensing, 2023, 15(22): 5317. doi: 10.3390/rs15225317. [10] 秦嘉豪, 李宝卫, 白雪, 等. 面向异质卫星集群的事件触发分布式自主任务规划方法[J]. 中国空间科学技术(中英文), 2025, 45(4): 88–101. doi: 10.16708/j.cnki.1000-758X.2025.0061.QIN Jiahao, LI Baowei, BAI Xue, et al. Distributed autonomous scheduling based on event trigger for heterogeneous satellite swarm[J]. Chinese Space Science and Technology, 2025, 45(4): 88–101. doi: 10.16708/j.cnki.1000-758X.2025.0061. [11] HILTON S, THANGAVEL K, GARDI A, et al. Intelligent mission planning for autonomous distributed satellite systems[J]. Acta Astronautica, 2024, 225: 123–136. doi: 10.1016/j.actaastro.2024.08.050. [12] 袁健波, 杜永浩, 陈盈果, 等. 面向点群与大区域目标的成像卫星任务规划模型与算法研究[J]. 系统工程与电子技术, 2025, 47(9): 2939–2950. doi: 10.12305/j.issn.1001-506X.2025.09.15.YUAN Jianbo, DU Yonghao, CHEN Yingguo, et al. Research on imaging satellite mission planning model and algorithm for point-cluster and large-region targets[J]. Systems Engineering and Electronics, 2025, 47(9): 2939–2950. doi: 10.12305/j.issn.1001-506X.2025.09.15. [13] LONG Jun, WU Shimin, HAN Xiaodong, et al. Autonomous task planning method for multi-satellite system based on a hybrid genetic algorithm[J]. Aerospace, 2023, 10(1): 70. doi: 10.3390/aerospace10010070. [14] CHEN Yaxin, SHEN Xin, ZHANG Guo, et al. Large-scale multi-objective imaging satellite task planning algorithm for vast area mapping[J]. Remote Sensing, 2023, 15(17): 4178. doi: 10.3390/rs15174178. [15] 许可, 孙昌浩, 谢睿达, 等. 基于DQN的对地观测卫星调度算法[J]. 空间控制技术与应用(中英文), 2026, 52(1): 68–78. doi: 10.3969/j.issn.1674-1579.2026.01.007.XU Ke, SUN Changhao, XIE Ruida, et al. Earth observation satellite scheduling based on DQN[J]. Aerospace Control and Application, 2026, 52(1): 68–78. doi: 10.3969/j.issn.1674-1579.2026.01.007. [16] 陈盈果, 王斐然, 胡云鹏, 等. 融合大语言模型与强化学习的敏捷卫星任务分配算法设计[J]. 电子与信息学报, 2025, 47(12): 4959–4972. doi: 10.11999/JEIT250991.CHEN Yingguo, WANG Feiran, HU Yunpeng, et al. Automating algorithm design for agile satellite task assignment with large language models and reinforcement learning[J]. Journal of Electronics & Information Technology, 2025, 47(12): 4959–4972. doi: 10.11999/JEIT250991. [17] WU Xiande, ZHANG Zehua, CHEN Zhengnan, et al. Intelligent task planning method for distributed satellite system based on reinforcement learning[J]. Aerospace Science and Technology, 2026, 168: 111325. doi: 10.1016/j.ast.2025.111325. [18] HE Xiaohe, XIANG Junyan, YAN Mubiao, et al. Integrated clustering and mission planning for agile Earth observation satellite constellations[J]. IEICE Transactions on Electronics, 2025, E108. C(11): 594–597. doi: 10.1587/transele.2024ECS6016. [19] LI Shuo, WANG Gang, and CHEN Jinyong. AEM-D3QN: A graph-based deep reinforcement learning framework for dynamic earth observation satellite mission planning[J]. Aerospace, 2025, 12(5): 420. doi: 10.3390/aerospace12050420. [20] 杜永浩, 黎磊, 徐世龙, 等. 基于智能优化算法引擎的可演进星群智能任务规划[J]. 电子与信息学报, 2025, 47(6): 1645–1657. doi: 10.11999/JEIT240974.DU Yonghao, LI Lei, XU Shilong, et al. Evolutionary optimization for satellite constellation task scheduling based on intelligent optimization engine[J]. Journal of Electronics & Information Technology, 2025, 47(6): 1645–1657. doi: 10.11999/JEIT240974. [21] 魏普远, 何磊. 基于深度强化学习的自适应大邻域搜索算法在成像卫星调度问题中的应用[J]. 电子与信息学报, 2025, 47(12): 5005–5015. doi: 10.11999/JEIT251009.WEI Puyuan and HE Lei. A deep reinforcement learning enhanced adaptive large neighborhood search for imaging satellite scheduling[J]. Journal of Electronics & Information Technology, 2025, 47(12): 5005–5015. doi: 10.11999/JEIT251009. [22] SAMVELYAN M, RASHID T, DE WITT C S, et al. The StarCraft multi-agent challenge[C]. Proceedings of the 18th International Conference on Autonomous Agents and MultiAgent Systems, Montreal, Canada, 2019. -



图(2) / 表(3)
计量
- 文章访问数: 5
- HTML全文浏览量: 1
- PDF下载量: 0
- 被引次数: 0
 下载:
下载:
