

Dual-MPC-Driven Modeling and Spatiotemporal Evolution of Intelligent Connected Traffic Risk Fields
-
摘要: 在智能网联车路云协同系统部署背景下,从路侧视角理清微观车流交互行为与风险场分布的相互作用机理,具有重要理论与应用价值。该文针对多车交互风险的统一建模与动态演化问题,提出一种基于多车动态风险场与双模型预测控制(MPC)的轨迹规划方法。建立面向车路协同的智能网联交通风险场模型,实现驾驶环境风险的连续空间化表征,并引入方向不均匀系数刻画车辆对前向与侧后方风险的感知非对称性。设计基于双MPC的分层决策与运动规划架构,上层基于风险场评估候选驾驶行为,输出最优行为模式;下层根据行为模式激活纵向速度规划MPC或换道轨迹规划MPC,将风险场嵌入代价函数以引导轨迹生成。选用HighD数据集(高速公路)与NGSIM数据集(城市快速路)进行验证,实验结果表明,所提方法能够有效刻画车流风险的时空演化特征,在RMSE、MAE、MAPE等指标上优于现有对比模型,有助于增强路侧系统对局部车流的实时感知与动态风险评估能力。Abstract:
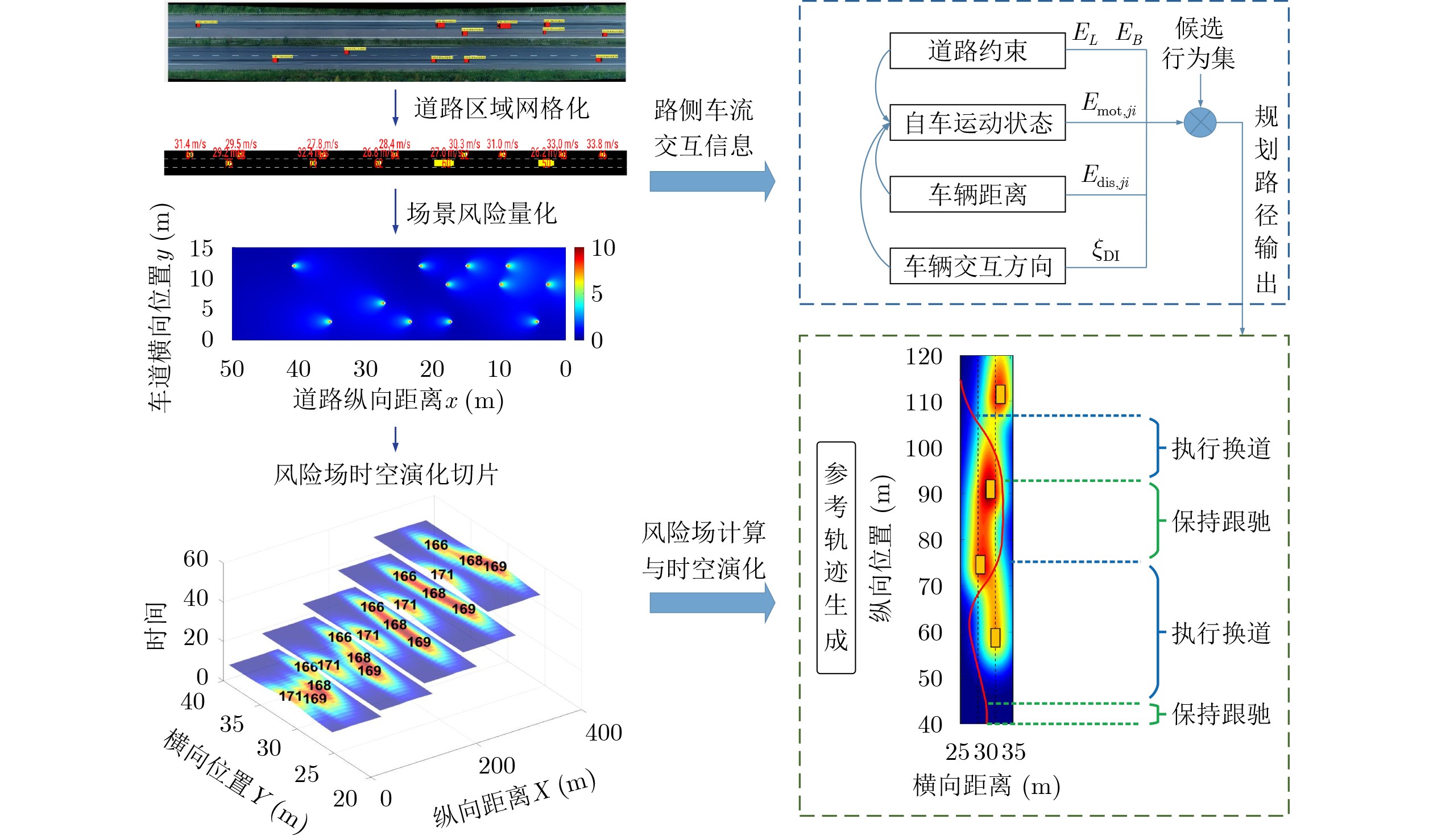
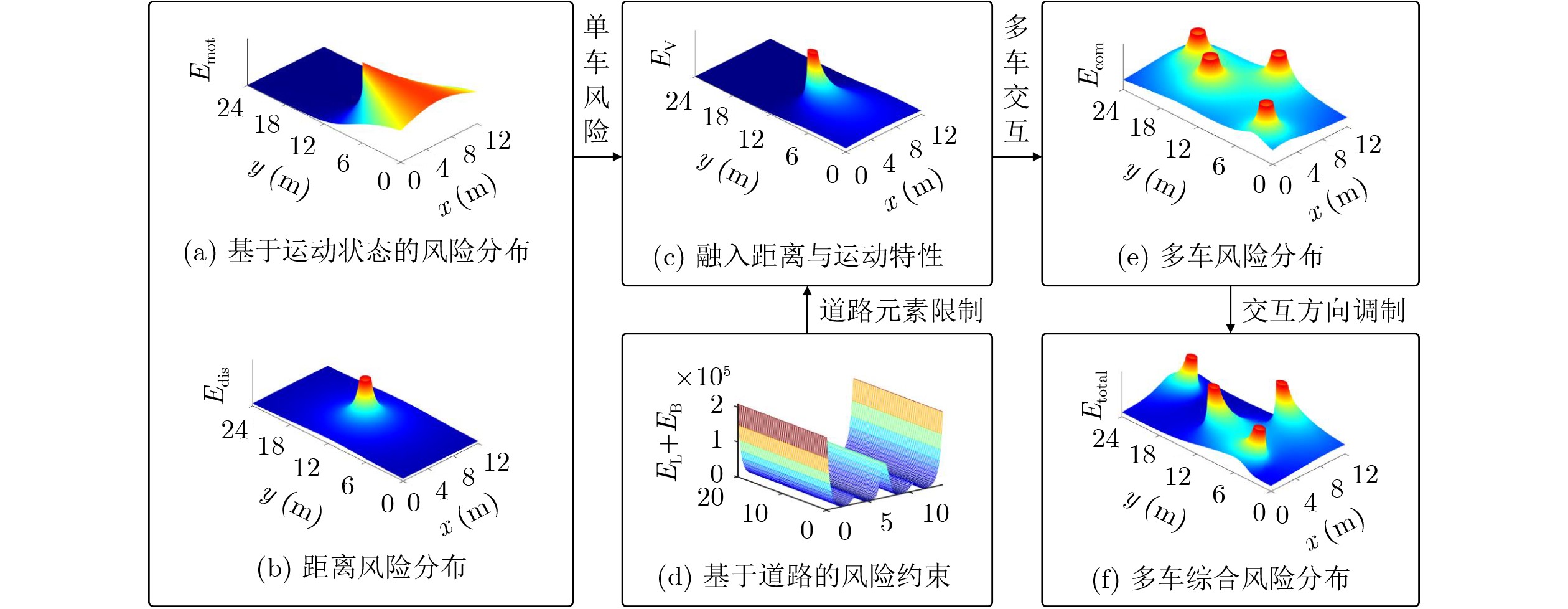
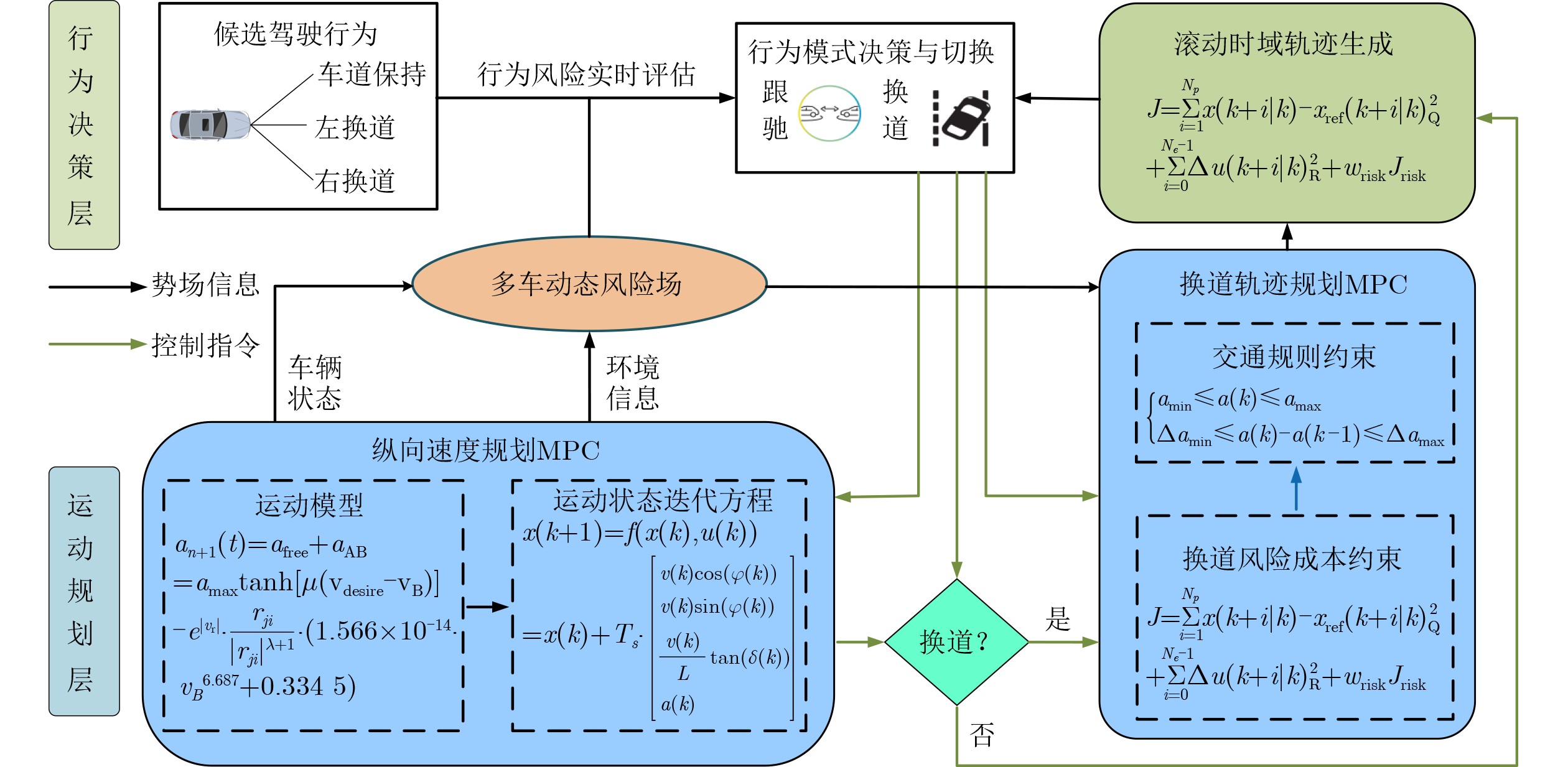
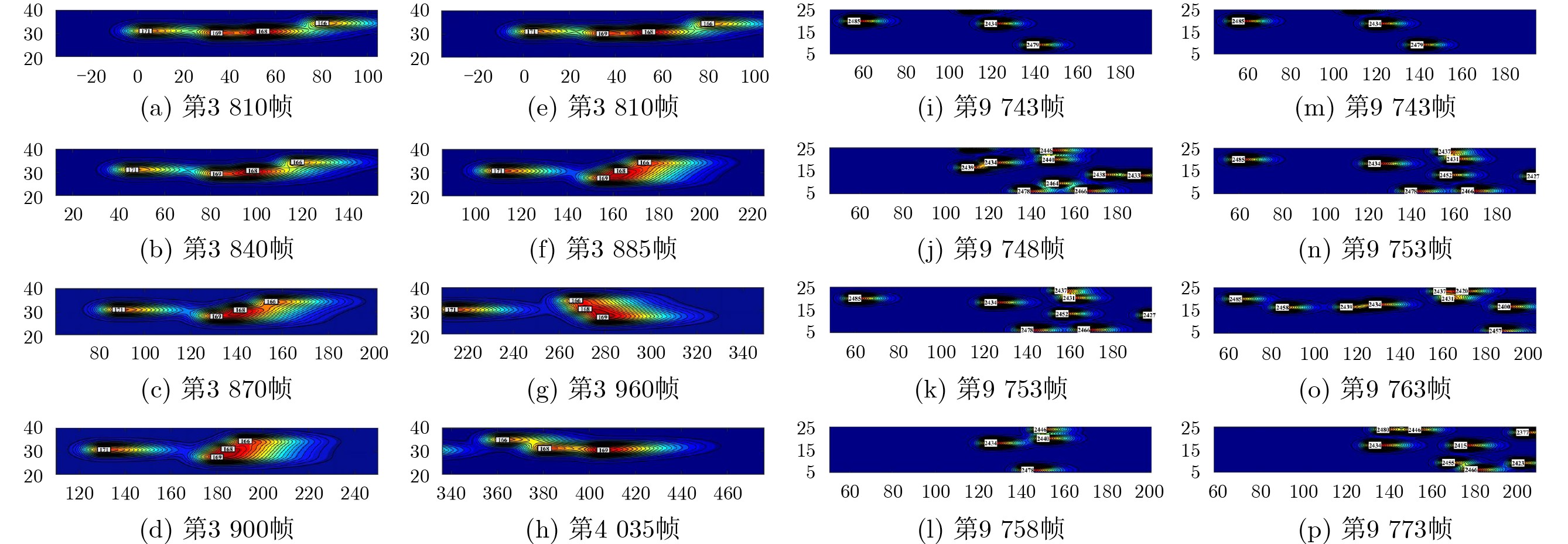
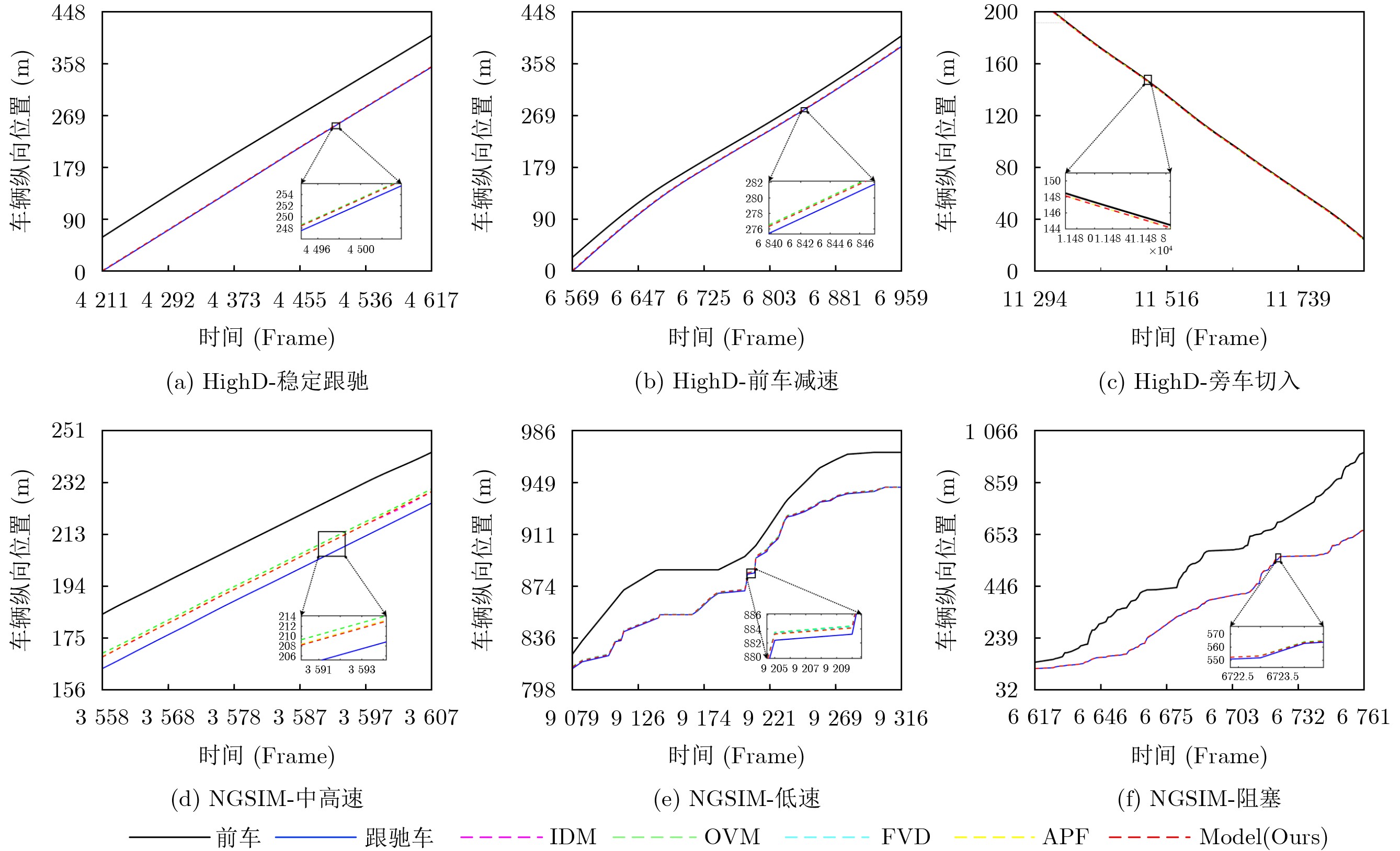
Objective With the deployment of intelligent connected vehicle-road-cloud cooperative systems, roadside infrastructure is evolving from traffic-state sensing units into intelligent decision-support platforms for multi-vehicle interaction analysis and dynamic risk inference. In highway and urban freeway scenarios, traffic operation is affected not only by the kinematic responses of individual vehicles but also by lane-changing intentions, car-following competition, and conflict propagation under local interactions. From a roadside perspective, a unified framework is therefore needed to continuously represent traffic risk, reveal its spatiotemporal evolution, and couple risk information with behavior decision-making and trajectory planning. Existing car-following models, such as the Optimal Velocity Model (OVM), Full Velocity Difference (FVD) Model, and Intelligent Driver Model (IDM), can describe speed-spacing evolution. However, these models mainly focus on longitudinal interactions and usually embed risk implicitly in safety-distance or acceleration constraints. They cannot explicitly characterize the coupling between longitudinal following and lateral lane changing, nor can they provide a continuous risk representation suitable for regional traffic assessment. Although Artificial Potential Field (APF) methods and Model Predictive Control (MPC) methods can improve trajectory safety, existing studies still lack a unified mechanism that links risk assessment, behavior decision-making, and motion planning. In addition, discrete behavior choices and continuous control actions are difficult to process efficiently within a single optimization framework. Methods An intelligent connected traffic risk-field model oriented toward vehicle-road cooperation is first established. The model integrates vehicle-interaction risk, lane-marking constraint risk, and road-boundary repulsive risk ( Fig. 1 ). In the vehicle-interaction layer, motion-state-induced risk is formulated by considering the relative speed and relative orientation between the ego vehicle and surrounding vehicles. Distance-induced risk is modeled to reflect attenuation as separation distance increases (Fig. 2(a) –(b) ). To represent the stronger influence of forward hazards than lateral and rear hazards, a directional non-uniformity coefficient is used. This coefficient adjusts the angular attenuation of field strength and enables anisotropic spatial risk representation around the vehicle. In the road-constraint layer, lane markings and road boundaries are modeled separately. The total driving risk field is obtained by weighting and combining the lane-marking field, road-boundary field, and multi-vehicle interaction field (Fig. 2(e) –(f) ). Based on this representation, a dual-MPC hierarchical decision and motion-planning architecture is designed (Fig. 3 ). In each control cycle, the upper layer evaluates candidate behavior modes according to the vehicle state, surrounding traffic state, and dynamic risk field, and then outputs a unique behavior mode. The lower layer activates the corresponding control branch. When lane keeping is selected, longitudinal speed-planning MPC is used. When lane changing is selected, lane-change trajectory-planning MPC is activated under road-boundary, lane-marking, and safe-gap constraints.Results and Discussions The proposed framework reconstructs microscopic traffic risk evolution under different datasets and time scales. In the HighD highway scenario, when the slicing interval is 0.4 s, the local evolution of following and lane-changing interactions is captured in detail. This includes the process in which the ego vehicle initially follows a preceding vehicle and then starts changing to the adjacent lane ( Fig. 4(a) –(d) ). When the interval is increased to 1.0 s, a wider spatiotemporal interaction range becomes visible, and lane-change completion and the subsequent return maneuver are identified more clearly (Fig. 4(e) –(h) ). In the NGSIM scenario, a smaller interval provides a finer description of the lane-change disturbance process. By contrast, a larger interval reveals the wider reconstruction of interaction relationships among the original lane, target lane, and surrounding vehicles (Fig. 4(i) –(p) ). These results indicate that the proposed roadside-oriented risk field can describe both local interaction details and larger-scale evolution trends, depending on the selected reconstruction interval. Sensitivity experiments further confirm the role of the directional non-uniformity coefficient. As this coefficient increases, forward risk concentration becomes stronger, local peak risk increases, and the coverage of high-risk regions decreases (Table 2 ). This finding shows that the coefficient effectively regulates anisotropic field distribution. Comparative experiments with IDM, OVM, FVD, and APF show that the proposed method performs better in most representative scenarios and error metrics (Fig. 5 ,Table 3 ). In the lateral cut-in scenario, its advantage lies in the early representation of lateral intrusion risk, which enables the behavior decision layer to anticipate conflict and the motion-planning layer to generate continuous evasive actions. In congested scenarios, the superposition of forward congestion risk, lateral neighboring-vehicle influence, and road-boundary constraints allows the dual-MPC controller to evaluate safety and feasibility simultaneously in local space.Conclusions A unified framework for roadside-oriented traffic-risk modeling and behavior-driven trajectory planning is developed. By integrating multi-vehicle interaction risk, lane-marking constraint risk, and road-boundary repulsive risk into a continuously evolving dynamic risk field, the spatial quantification of multi-vehicle interaction risk is realized. The directional non-uniformity coefficient further enables asymmetric risk perception modeling in forward, lateral, and rear directions. On this basis, a dual-MPC hierarchical architecture is constructed to couple behavior decision-making with motion planning, so that lane-keeping and lane-changing behaviors can be adaptively selected and optimized under a unified risk-driven mechanism. Experiments based on HighD and NGSIM datasets show that the proposed method can effectively characterize the spatiotemporal evolution of traffic-risk fields and outperform representative comparison models in most typical scenarios and error metrics. -
表 1 仿真实验参数设置
参数 取值(单位) 参数 取值(单位) $ {{k}}_{\theta } $ 0.7(无量纲) $ \delta $ 1.0(无量纲) $ {{A}}_{\mathrm{lt}} $ 1/exp(14)(无量纲) $ {{a}}_{\mathrm{max}} $ 3.79(m/s²) $ {{k}}_{\mathrm{L}} $ 0.4(无量纲) $ {{v}}_{\mathrm{desire}} $ 100(km/h) $ {{A}}_{\mathrm{bt}} $ 1/exp(14) $ \mu $ 1.25(无量纲) $ {{k}}_{\mathrm{B}} $ 0.4(无量纲) $ {{T}}_{\mathrm{s}} $ 0.1(s) $ {{N}}_{\mathrm{p}} $ 15(无量纲) $ {{N}}_{\mathrm{e}} $ 10(无量纲)  下载: 导出CSV
下载: 导出CSV
表 2 HighD与NGSIM数据集下不均匀系数敏感性实验结果
数据集 取值 场景 风险场
峰值
强度高风险
覆盖率
(%)RMSE MAE MAPE HighD 0.1 稳定跟驰 1.4758 17.854 1.01010 0.90314 1.6107 前车减速 1.4758 17.850 1.11610 1.0143 1.2545 旁车切入 1.4878 16.819 0.40641 0.32538 9.4664 0.3 稳定跟驰 1.7280 16.819 0.96629 0.86376 1.8554 前车减速 1.7280 16.825 1.06920 0.97433 1.4686 旁车切入 1.7749 16.504 0.40641 0.32538 9.4664 0.5 稳定跟驰 1.9631 15.142 0.92729 0.82856 2.0765 前车减速 1.9631 15.141 1.02720 0.93867 1.6624 旁车切入 2.0513 15.175 0.40641 0.32538 9.4664 0.7 稳定跟驰 2.1722 13.875 0.89420 0.79855 2.2669 前车减速 2.1722 13.880 0.99142 0.90831 1.8295 旁车切入 2.3040 13.952 0.40641 0.32538 9.4664 0.9 稳定跟驰 2.3514 14.127 0.86719 0.77391 2.4244 前车减速 2.3514 14.113 0.96204 0.88344 1.9679 旁车切入 2.5253 14.447 0.40641 0.32538 9.4664 NGSIM 0.1 中高速 1.4758 17.833 0.82557 0.71506 0.7326 低速 1.4750 17.407 0.69200 0.58718 7.0208 阻塞 1.4753 17.720 4.42710 3.39930 14.5680 0.3 中高速 1.7280 16.841 0.81314 0.70506 0.8410 低速 1.7353 16.740 0.69553 0.58957 7.1281 阻塞 1.7278 16.832 4.47350 3.43370 14.4080 0.5 中高速 1.9631 15.153 0.80236 0.69649 0.9371 低速 1.9887 15.141 0.69859 0.59163 7.2317 阻塞 1.9645 15.151 4.51110 3.46190 14.2280 0.7 中高速 2.1722 13.890 0.79355 0.68957 1.0174 低速 2.2281 14.075 0.70111 0.59332 7.3590 阻塞 2.1763 13.880 4.54360 3.48630 14.0830 0.9 中高速 2.3513 14.093 0.78664 0.68421 1.0821 低速 2.4511 14.242 0.70319 0.59471 7.5005 阻塞 2.3593 14.093 4.57040 3.50640 13.9680
下载: 导出CSV
表 3 不同模型在各场景下的误差指标对比
模型 指标 HighD NGSIM 稳定跟驰 前车减速 旁车切入 中高速 低速 阻塞 IDM RMSE 0.8691 1.0035 0.3374 4.1834 0.6517 0.9641 MAE 0.8690 0.9932 0.3367 4.1802 0.5523 0.8359 MAPE 0.0172 0.1499 0.2169 2.1758 5.7783 5.3894 OVM RMSE 1.0365 1.1981 0.3416 5.2766 0.9023 1.2108 MAE 1.0364 1.1873 0.3408 5.2750 0.7355 1.1384 MAPE 0.0157 0.1790 1.1543 1.8501 6.7802 5.9028 FVD RMSE 0.8809 1.0107 0.3391 4.436 0.8880 0.9653 MAE 0.8808 1.0004 0.3384 4.4354 0.8336 0.8377 MAPE 0.0171 0.1498 0.4375 1.2184 5.8467 5.3797 APF RMSE 0.8693 1.0067 0.3383 4.4168 0.6711 0.9812 MAE 0.8692 0.9963 0.3375 4.4162 0.5733 0.8551 MAPE 0.0173 0.1492 0.1639 1.2949 5.7647 5.3794 Model
(Ours)RMSE 0.8690 1.0067 0.3373 4.2235 0.6901 0.9667 MAE 0.8689 0.9965 0.3366 4.2231 0.5877 0.8458 MAPE 0.0171 0.1481 0.1441 1.0080 5.7198 5.3705
下载: 导出CSV
-
[1] 丁飞, 张楠, 李升波, 等. 智能网联车路云协同系统架构与关键技术研究综述[J]. 自动化学报, 2022, 48(12): 2863–2885. doi: 10.16383/j.aas.c211108.DING Fei, ZHANG Nan, LI Shengbo, et al. A survey of architecture and key technologies of intelligent connected vehicle-road-cloud cooperation system[J]. Acta Automatica Sinica, 2022, 48(12): 2863–2885. doi: 10.16383/j.aas.c211108. [2] 李立, 李仕琪, 徐志刚, 等. 集成学习框架下的车辆跟驰行为建模[J]. 哈尔滨工业大学学报, 2024, 56(3): 46–55. doi: 10.11918/202205090.LI Li, LI Shiqi, XU Zhigang, et al. Modeling of car-following behavior under an ensemble learning framework[J]. Journal of Harbin Institute of Technology, 2024, 56(3): 46–55. doi: 10.11918/202205090. [3] FU Yongchen, HU Wei, SHANG Jian, et al. A fractional-order car-following model with random delay optimized by an enhanced whale optimization algorithm[J]. Nonlinear Dynamics, 2025, 113(16): 21277–21303. doi: 10.1007/s11071-025-11271-4. [4] XU Xing, WU Zekun, and ZHAO Yun. An improved longitudinal driving car-following system considering the safe time domain strategy[J]. Sensors, 2024, 24(16): 5202. doi: 10.3390/s24165202. [5] QIU Bing and KUANG Hua. A comprehensive review of dynamic modeling methods for extended optimal velocity car-following models in traffic flow[J]. Nonlinear Dynamics, 2025, 113(10): 10861–10879. doi: 10.1007/s11071-024-10660-5. [6] ZHANG Jing, GAO Qian, TIAN Junfang, et al. Car-following model based on spatial expectation effect in connected vehicle environment: Modeling, stability analysis and identification[J]. Physica A: Statistical Mechanics and its Applications, 2024, 641: 129747. doi: 10.1016/j.physa.2024.129747. [7] VASCONCELOS L and BANDEIRA J M. Calibration of the Intelligent Driver Model (IDM) at the microscopic level[J]. Future Transportation, 2025, 5(2): 57. doi: 10.3390/futuretransp5020057. [8] WANG Zhaojie, LU Guangquan, and TAN Haitian. Driving behavior model for multi-vehicle interaction at uncontrolled intersections based on risk field considering drivers’ visual field characteristics[J]. IEEE Transactions on Intelligent Transportation Systems, 2024, 25(11): 15532–15546. doi: 10.1109/tits.2024.3465442. [9] GUO Wenfeng, LUO Jing, SONG Xiaolin, et al. A crash-injury-aware driving safety field for real-time risk assessment and its application in autonomous vehicle motion planning[J]. Accident Analysis & Prevention, 2025, 222: 108224. doi: 10.1016/j.aap.2025.108224. [10] CHENG Zeyang, ZHU Jinyang, FENG Zhongxiang, et al. Driving safety risk analysis and assessment in a mixed driving environment of connected and non-connected vehicles: A systematic survey[J]. IEEE Transactions on Intelligent Transportation Systems, 2025, 26(5): 5747–5781. doi: 10.1109/tits.2025.3526820. [11] WANG Zhuoer, SHI Baohan, ZHANG Jianping, et al. A data-driven spatio-temporal driving risk field mechanism for path planning[J]. Expert Systems with Applications, 2026, 298: 129834. doi: 10.1016/j.eswa.2025.129834. [12] WANG Tao, QU Dayi, WANG Kedong, et al. Risk-aware lane change and trajectory planning for connected autonomous vehicles based on a potential field model[J]. World Electric Vehicle Journal, 2024, 15(11): 489. doi: 10.3390/wevj15110489. [13] GAO Yan, LI Dazhi, SUI Zhen, et al. Trajectory planning and tracking control of autonomous vehicles based on improved artificial potential field[J]. IEEE Transactions on Vehicular Technology, 2024, 73(9): 12468–12483. doi: 10.1109/tvt.2024.3389054. [14] YIN Jiacheng, LI Zongping, CAO Peng, et al. Car-following modeling based on Morse model with consideration of road slope in connected vehicles environment[J]. Physica A: Statistical Mechanics and its Applications, 2023, 622: 128827. doi: 10.1016/j.physa.2023.128827. [15] 唐伦, 戴军, 成章超, 等. 基于数字孪生的多自动驾驶车辆分布式协同路径规划算法[J]. 电子与信息学报, 2024, 46(6): 2525–2532. doi: 10.11999/JEIT230678.TANG Lun, DAI Jun, CHENG Zhangchao, et al. Distributed collaborative path planning algorithm for multiple autonomous vehicles based on digital twin[J]. Journal of Electronics & Information Technology, 2024, 46(6): 2525–2532. doi: 10.11999/JEIT230678. [16] WANG Zhaojie, LU Guangquan, TAN Haitian, et al. A risk-field based motion planning method for multi-vehicle conflict scenario[J]. IEEE Transactions on Vehicular Technology, 2024, 73(1): 310–322. doi: 10.1109/tvt.2023.3308912. [17] FANG Xuan and TETTAMANTI T. Change in microscopic traffic simulation practice with respect to the emerging automated driving technology[J]. Periodica Polytechnica Civil Engineering, 2022, 66(1): 86–95. doi: 10.3311/ppci.17411. [18] 赵川斌, 许伟华, 林博, 等. 融合视觉的多模态通信感知一体化关键技术及原型验证[J]. 电子与信息学报, 2026, 48(2): 487–498. doi: 10.11999/JEIT250685.ZHAO Chuanbin, XU Weihua, LIN Bo, et al. Vision enabled multimodal integrated sensing and communications: Key technologies and prototype validation[J]. Journal of Electronics & Information Technology, 2026, 48(2): 487–498. doi: 10.11999/JEIT250685. [19] 霍如, 吕科呈, 黄韬. 车联网中路径预测驱动的任务切分与计算资源分配方法[J]. 电子与信息学报, 2025, 47(10): 3658–3669. doi: 10.11999/JEIT250135.HUO Ru, LÜ Kecheng, and HUANG Tao. Task segmentation and computing resource allocation method driven by path prediction in internet of vehicles[J]. Journal of Electronics & Information Technology, 2025, 47(10): 3658–3669. doi: 10.11999/JEIT250135. [20] SAMADA S E, PUIG V, NEJJARI F, et al. Safe planning using mixed-integer programming for autonomous vehicles coordination[J]. Robotics and Autonomous Systems, 2025, 193: 105078. doi: 10.1016/j.robot.2025.105078. [21] YANG Weishan, CHEN Yuepeng, and SU Yixin. A double-layer model predictive control approach for collision-free lane tracking of on-road autonomous vehicles[J]. Actuators, 2023, 12(4): 169. doi: 10.3390/act12040169. [22] WANG Xuefang, JIANG Jingjing, and CHEN Wenhua. High-level decision making in a hierarchical control framework: Integrating HMDP and MPC for autonomous systems[J]. IEEE Transactions on Cybernetics, 2025, 55(4): 1903–1916. doi: 10.1109/tcyb.2025.3535159. [23] LIU Ming, ZHANG Yuanjian, LENG Bo, et al. Time-efficient hierarchical vehicle control framework for path tracking in intelligent vehicles[J]. International Journal of Automotive Technology, 2026, 27(2): 595–607. doi: 10.1007/s12239-025-00267-z. [24] MA Haozhan, AN Bocheng, LI Linheng, et al. Anisotropy safety potential field model under intelligent and connected vehicle environment and its application in car-following modeling[J]. Journal of Intelligent and Connected Vehicles, 2023, 6(2): 79–90. doi: 10.26599/jicv.2023.9210006. -



图(5) / 表(3)
计量
- 文章访问数: 15
- HTML全文浏览量: 6
- PDF下载量: 1
- 被引次数: 0
 下载:
下载:
