

Robust Optimization of Low-altitude Communication and Computation Resources in Uncertain Environments
-
摘要: 针对低空边缘网络中因任务数据量的突发性与无人机飞行位置抖动所引起的服务质量下降问题,该文提出一种基于分布鲁棒优化的系统能耗最小化方法。首先,综合考虑任务大小和飞行位置不确定性因素,建立以最小化系统加权总能耗为目标的网络模型,并对无人机飞行轨迹、任务划分以及计算与通信资源进行协同设计。其次,将该非凸且复杂的优化问题建模为马尔可夫决策过程,并提出基于分布鲁棒优化的软演员-评论家算法。该算法通过构建任务需求分布的模糊集以处理分布不确定性,并借助最大熵强化学习框架,在连续动作空间中求解最坏概率分布下的最优策略。仿真结果表明,所提算法在动态环境中具有更快的收敛速度,且在不同任务负载及位置扰动下均能显著降低系统加权能耗,其中用户和无人机能耗分别降低了21.1%和15.9%。Abstract:
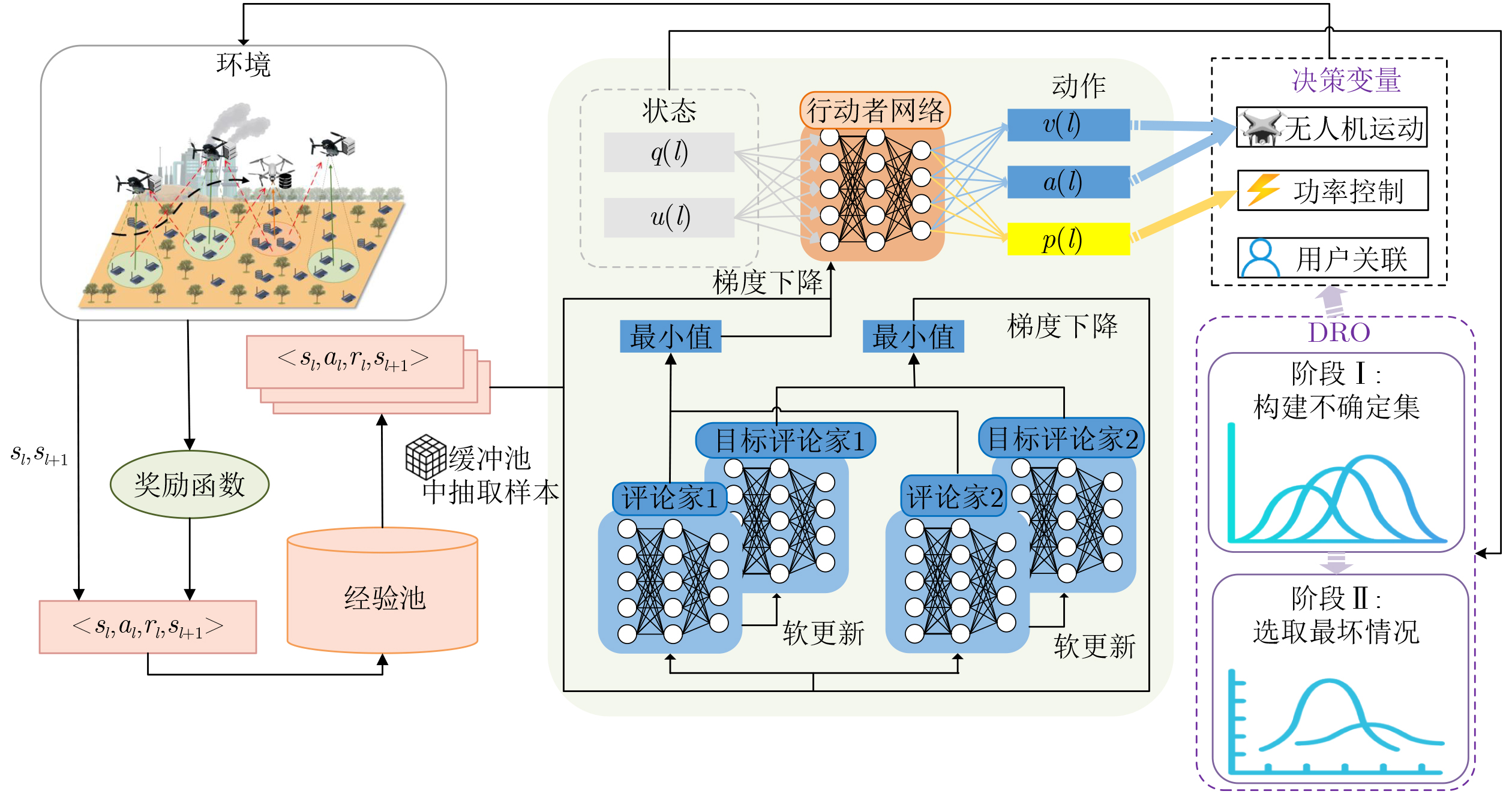
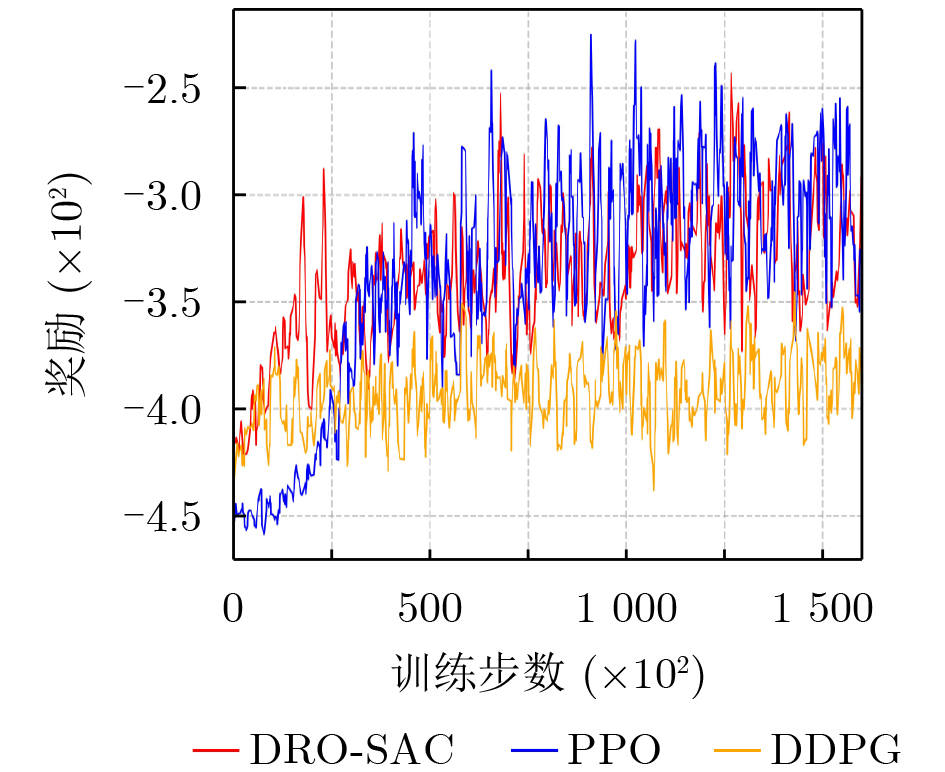
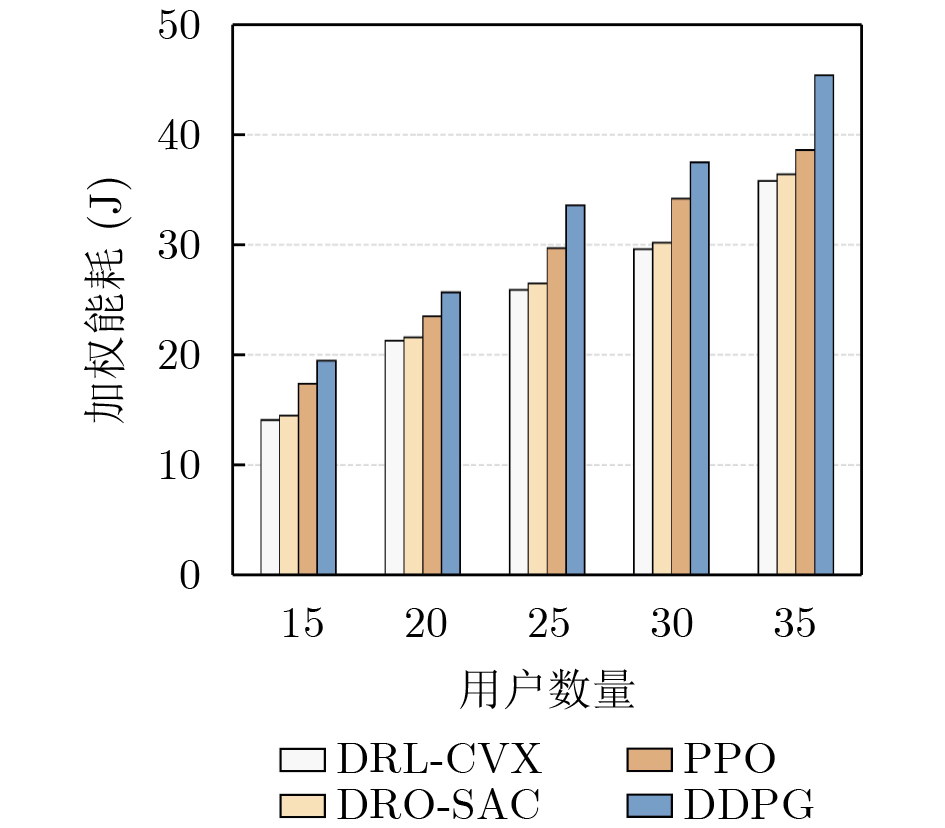
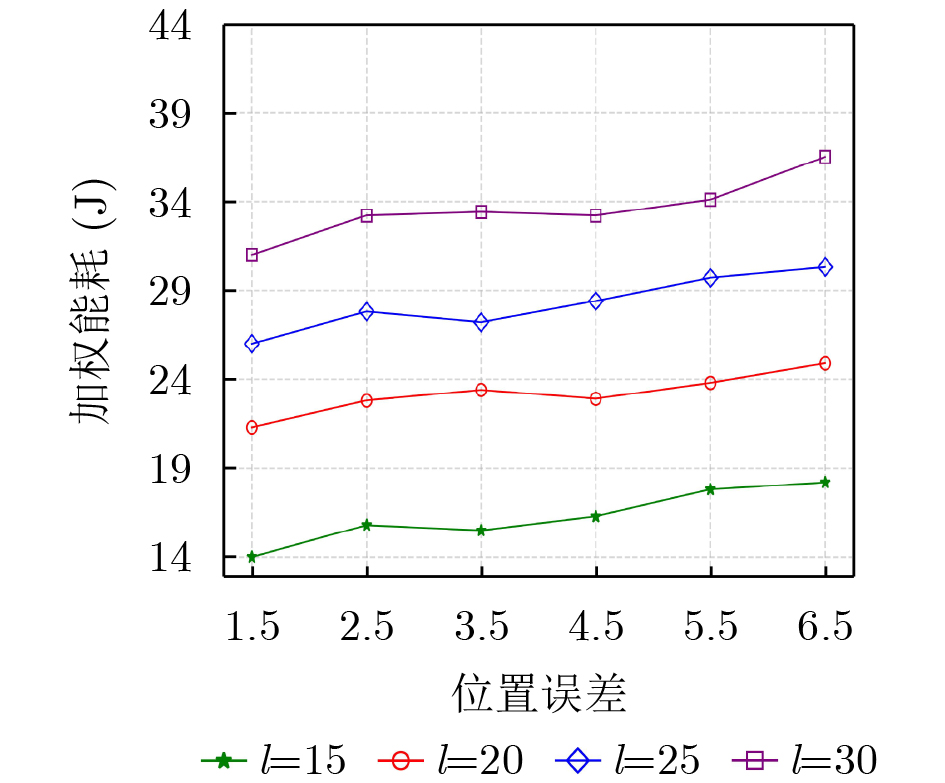
Objective Low-altitude edge computing networks provide flexible computing services and extended coverage for user equipment. However, quality of service is often degraded by uncertainty in task data size and by Unmanned Aerial Vehicle (UAV) position jitter caused by environmental disturbances. Existing robust methods commonly rely on deterministic uncertainty sets, which tend to be conservative and cannot accurately describe the stochastic distribution of task demands. To address these challenges, a robust energy minimization framework is proposed for multi-UAV-assisted Mobile Edge Computing (MEC) networks. The objective is to minimize the weighted sum of system energy consumption. This is achieved by developing a joint optimization model that coordinates UAV flight trajectories, task splitting decisions, and computation and communication resource allocation. The model explicitly accounts for the dual uncertainties of task data size and UAV trajectory. Methods To handle the nonconvexity and strong coupling among optimization variables, the problem is first modeled as a Markov Decision Process (MDP). A comprehensive state space is defined to characterize real-time system dynamics, and a continuous action space is designed for trajectory control and resource management. A Distributionally Robust Optimization Soft Actor-Critic (DRO-SAC) algorithm is then developed to solve the MDP. In this framework, an ambiguity set based on the L1-norm distance is constructed to characterize the distributional uncertainty of the task demand distribution. A maximum-entropy reinforcement learning mechanism is used to learn an optimal policy under the worst-case distribution within the ambiguity set. In this way, UAV trajectories, task splitting, and computation and communication resource allocation are jointly optimized to improve system robustness under dynamic environmental fluctuations. Results and Discussions The performance of the proposed DRO-SAC algorithm is evaluated through simulations. DRO-SAC achieves faster convergence and higher rewards than Deep Deterministic Policy Gradient (DDPG) and Proximal Policy Optimization (PPO) algorithms ( Fig. 3 ). For energy consumption, the proposed method consistently achieves higher efficiency under different user densities (Fig. 4 ). The robustness of the system against position errors is also verified, with energy fluctuations kept at a low level (Fig. 5 ). Dynamic trajectory adjustment further confirms that the proposed method can provide effective user coverage while reducing system energy consumption (Fig. 6 ).Conclusions A DRO-SAC-based joint optimization framework is proposed to address uncertainty in task data size and UAV position jitter in multi-UAV-assisted MEC networks. By constructing an ambiguity set for the task demand distribution and optimizing the worst-case expected objective, the proposed method mitigates the limitations of traditional deterministic models in dynamic environments. Weighted system energy consumption is minimized while latency and safety constraints are satisfied. Simulation results demonstrate that the proposed scheme achieves stable convergence and high energy efficiency, even when communication and computation resources are limited and environmental parameters fluctuate strongly. -
1 本文所提DRO-SAC算法
(1) 建立经验回放池$ {\mathcal{R}} $,初始化网络参数 (2) 对每个训练周期执行: (3) 对每个环境交互步骤执行: (4) 根据策略分布$ {\pi }_{\phi }({a}_{l}|{s}_{l}) $采样动作$ {a}_{l} $ (5) 构建不确定性集合$ {D}_{i} $,选择分布$ {{\mathbb{P}}}_{i} $ (6) 获得奖励$ {r}_{l} $,并观测下一状态$ {s}_{l+1} $ (7) 将状态转移元组$ ({s}_{l},{a}_{l},{r}_{l},{s}_{l+1}) $存入经验回放池$ {\mathcal{R}} $ (8) 对每个梯度更新步骤执行: (9) 从$ {\mathcal{R}} $中随机采样一批经验样本 (10) 优化评论家网络:$ {\theta }_{k}\leftarrow {{\text{∇}}}_{{{\theta }_{k}}}{J}_{Q}({\theta }_{k}),k\in \{1,2\} $ (11) 更新策略网络:$ \phi \leftarrow {{\text{∇}}}_{\phi }{J}_{\pi }(\phi ) $ (12) 对目标网络进行软更新:$ {\overline{\theta }}_{k}\leftarrow \varsigma {\theta }_{k}+(1-\varsigma ){\overline{\theta }}_{k},k\in \{1,2\} $  下载: 导出CSV
下载: 导出CSV
表 1 参数设置
参数 设置 参数 设置 桨叶叶尖速度$ {U}_{\text{tip}} $ 120 m/s 无人机飞行高度$ H $ 150 m 叶片功率$ {P}_{1} $ 59.03 W 无人机最小安全距离$ {d}_{\text{dim}} $ 3 m 悬停功率$ {P}_{2} $ 79.07 W 最大发射功率$ p_i^{\text{max}} $ 0.5 W 旋翼速度$ v_0 $ 3.6 m/s 无人机最大计算能力$ f_{\mathrm{u}}^{\text{max}} $ 10 GHz 旋翼面积$ {A}_{0} $ 0.5030 m2用户最大计算能力$ f_{i}^{\text{max}} $ 1 GHz 无人机最大飞行速度$ {v}_{\text{max}} $ 35 m/s 信道高斯白噪声功率$ {\sigma }^{2} $ –85 dBm 信道带宽$ B $ 10 MHz 无人机最大服务用户上限$ {M}_{\max } $ 8
下载: 导出CSV
-
[1] 陈新颖, 盛敏, 李博, 等. 面向6G的无人机通信综述[J]. 电子与信息学报, 2022, 44(3): 781–789. doi: 10.11999/JEIT210789.CHEN Xinying, SHENG Min, LI Bo, et al. Survey on unmanned aerial vehicle communications for 6G[J]. Journal of Electronics & Information Technology, 2022, 44(3): 781–789. doi: 10.11999/JEIT210789. [2] JIA Ziye, CUI Can, DONG Chao, et al. Distributionally robust optimization for aerial multi-access edge computing via cooperation of UAVs and HAPs[J]. IEEE Transactions on Mobile Computing, 2025, 24(10): 10853–10867. doi: 10.1109/TMC.2025.3571023. [3] ZHANG Xin, CHANG Zheng, HÄMÄLÄINEN T, et al. AoI-energy tradeoff for data collection in UAV-assisted wireless networks[J]. IEEE Transactions on Communications, 2024, 72(3): 1849–1861. doi: 10.1109/TCOMM.2023.3337400. [4] FAN Rongfei, LIANG Bizheng, ZUO Shiyuan, et al. Robust task offloading and resource allocation in mobile edge computing with uncertain distribution of computation burden[J]. IEEE Transactions on Communications, 2023, 71(7): 4283–4299. doi: 10.1109/TCOMM.2023.3269839. [5] XU Bin, KUANG Zhufang, GAO Jie, et al. Joint offloading decision and trajectory design for UAV-enabled edge computing with task dependency[J]. IEEE Transactions on Wireless Communications, 2023, 22(8): 5043–5055. doi: 10.1109/TWC.2022.3231408. [6] ZHAO Nan, YE Zhiyang, PEI Yiyang, et al. Multi-agent deep reinforcement learning for task offloading in UAV-assisted mobile edge computing[J]. IEEE Transactions on Wireless Communications, 2022, 21(9): 6949–6960. doi: 10.1109/TWC.2022.3153316. [7] 张广驰, 何梓楠, 崔苗. 基于深度强化学习的无人机辅助移动边缘计算系统能耗优化[J]. 电子与信息学报, 2023, 45(5): 1635–1643. doi: 10.11999/JEIT220352.ZHANG Guangchi, HE Zinan, and CUI Miao. Energy consumption optimization of unmanned aerial vehicle assisted mobile edge computing systems based on deep reinforcement learning[J]. Journal of Electronics & Information Technology, 2023, 45(5): 1635–1643. doi: 10.11999/JEIT220352. [8] YE Neng, CHEN Lu, OUYANG Qiaolin, et al. Time-efficient data download for emergency UAV: Joint optimization of on-board computation and communication under energy constraint[J]. IEEE Transactions on Vehicular Technology, 2023, 72(10): 13718–13722. doi: 10.1109/TVT.2023.3276866. [9] WANG Haibo, XU Hongli, HUANG He, et al. Robust task offloading in dynamic edge computing[J]. IEEE Transactions on Mobile Computing, 2023, 22(1): 500–514. doi: 10.1109/TMC.2021.3068748. [10] LIU Zhixin, SU Jiawei, WEI Jianshuai, et al. Joint robust power control and task scheduling for vehicular offloading in cloud-assisted MEC networks[J]. IEEE Transactions on Network Science and Engineering, 2025, 12(2): 698–709. doi: 10.1109/TNSE.2024.3508847. [11] LI Bin, YANG Rongrong, LIU Lei, et al. Robust computation offloading and trajectory optimization for multi-UAV-assisted MEC: A multiagent DRL approach[J]. IEEE Internet of Things Journal, 2024, 11(3): 4775–4786. doi: 10.1109/JIOT.2023.3300718. [12] NAN Zhaojun, HAN Yunchu, YAN Jintao, et al. Robust task offloading and resource allocation under imperfect computing capacity information in edge intelligence systems[J]. IEEE Transactions on Mobile Computing, 2025, 24(7): 6154–6167. doi: 10.1109/TMC.2025.3539296. [13] OUYANG Jian, DING Jing, WANG Runan, et al. Robust secrecy-energy efficient beamforming for jittering UAV in cognitive satellite-aerial networks[J]. IEEE Transactions on Aerospace and Electronic Systems, 2025, 61(4): 9567–9583. doi: 10.1109/TAES.2025.3552313. [14] LIU Boyang, WAN Yiyao, ZHOU Fuhui, et al. Resource allocation and trajectory design for MISO UAV-assisted MEC networks[J]. IEEE Transactions on Vehicular Technology, 2022, 71(5): 4933–4948. doi: 10.1109/TVT.2022.3140833. [15] HUA Meng, YANG Luxi, WU Qingqing, et al. UAV-assisted intelligent reflecting surface symbiotic radio system[J]. IEEE Transactions on Wireless Communications, 2021, 20(9): 5769–5785. doi: 10.1109/TWC.2021.3070014. -





图(6) / 表(2)
计量
- 文章访问数: 349
- HTML全文浏览量: 92
- PDF下载量: 47
- 被引次数: 0
 下载:
下载:
