

Research on UAV-assisted Dynamic-weight Edge Computing Offloading Strategy
-
摘要: 针对无人机辅助移动边缘计算环境下计算资源受限、系统处理任务总开销过高问题,该文提出基于协同缓存自适应的分层多元宇宙优化(CCAH-MVO)算法优化卸载策略。首先,构建微云-边缘-本地3层网络架构,在无人机边缘服务器上预制缓存程序,采用细粒度部分卸载策略,并针对多无人机覆盖的终端设备制定无人机选择策略。然后,提出CCAH-MVO算法协同优化缓存、卸载和资源分配,并引入动态权重机制自适应平衡时延与能耗,得到最优卸载策略。仿真结果表明,所提策略的时延更优、能耗在裕度区内可控,综合性能优于基准卸载策略。Abstract:
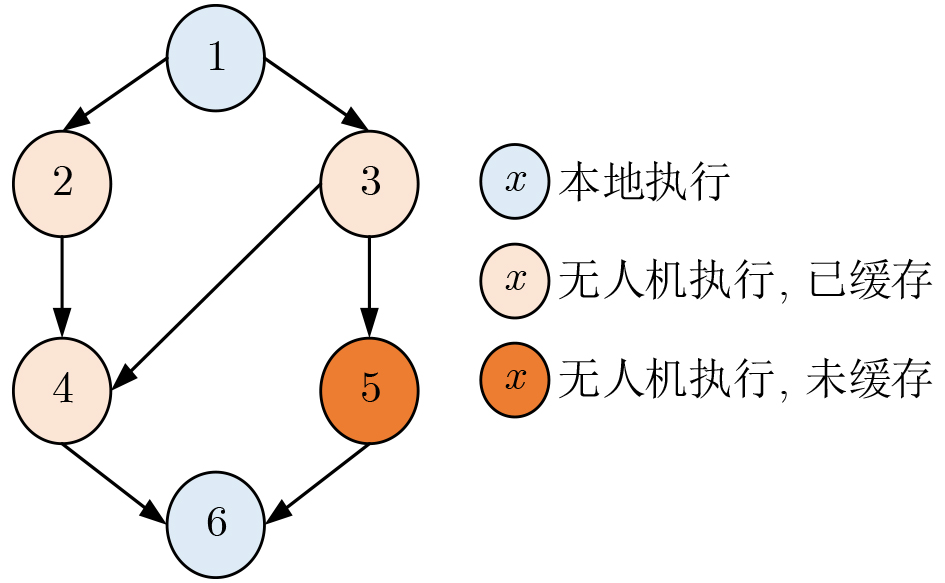
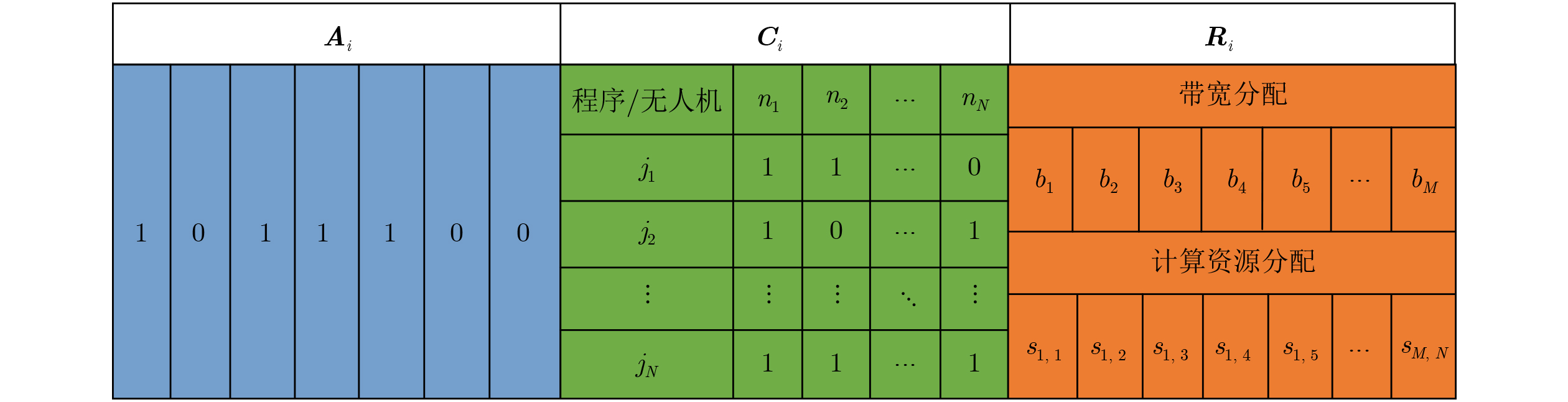
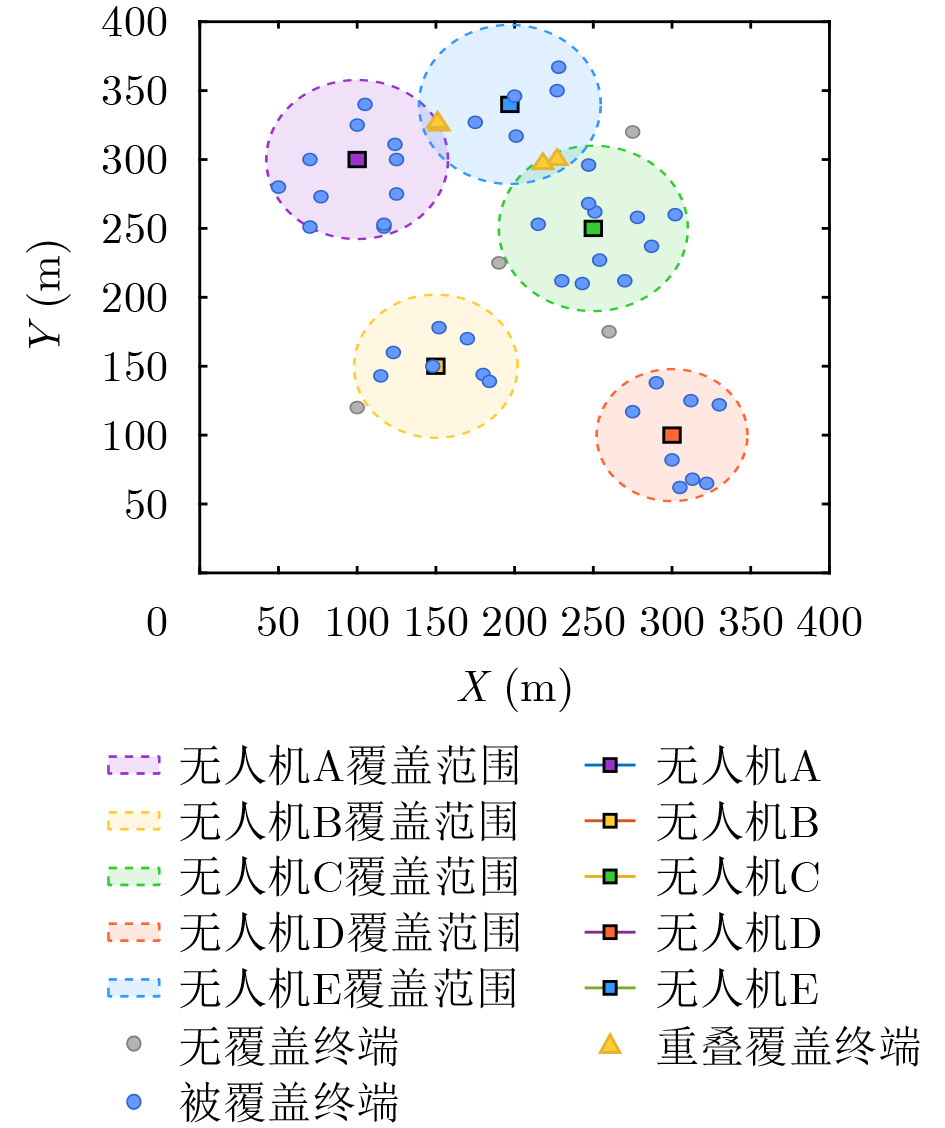
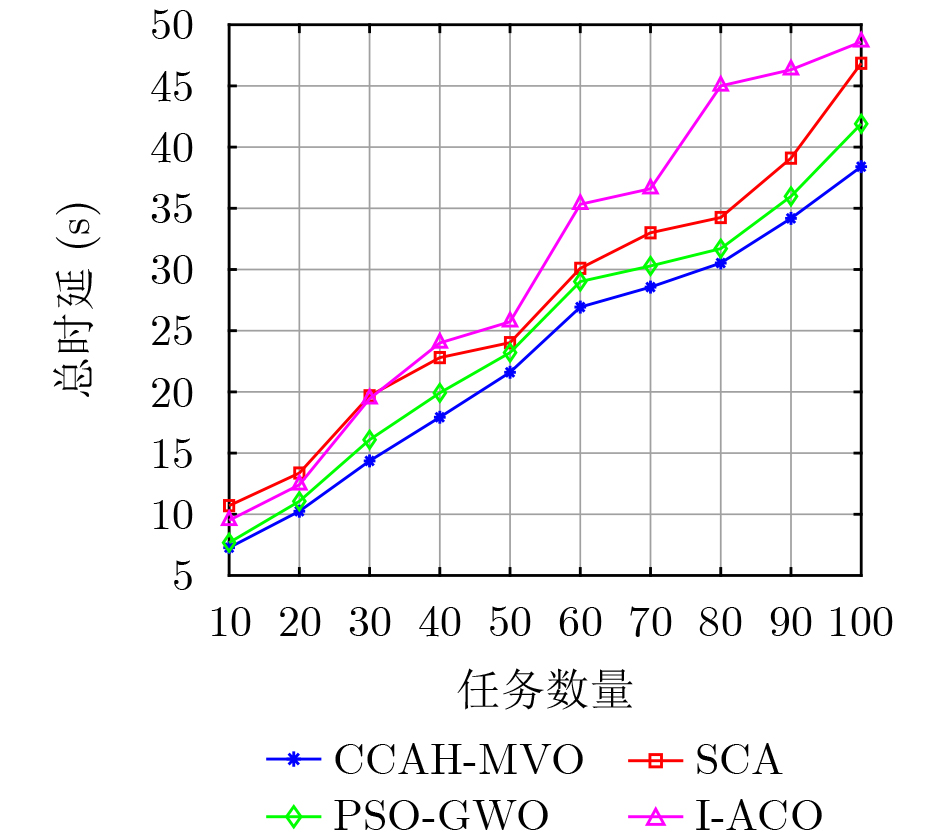
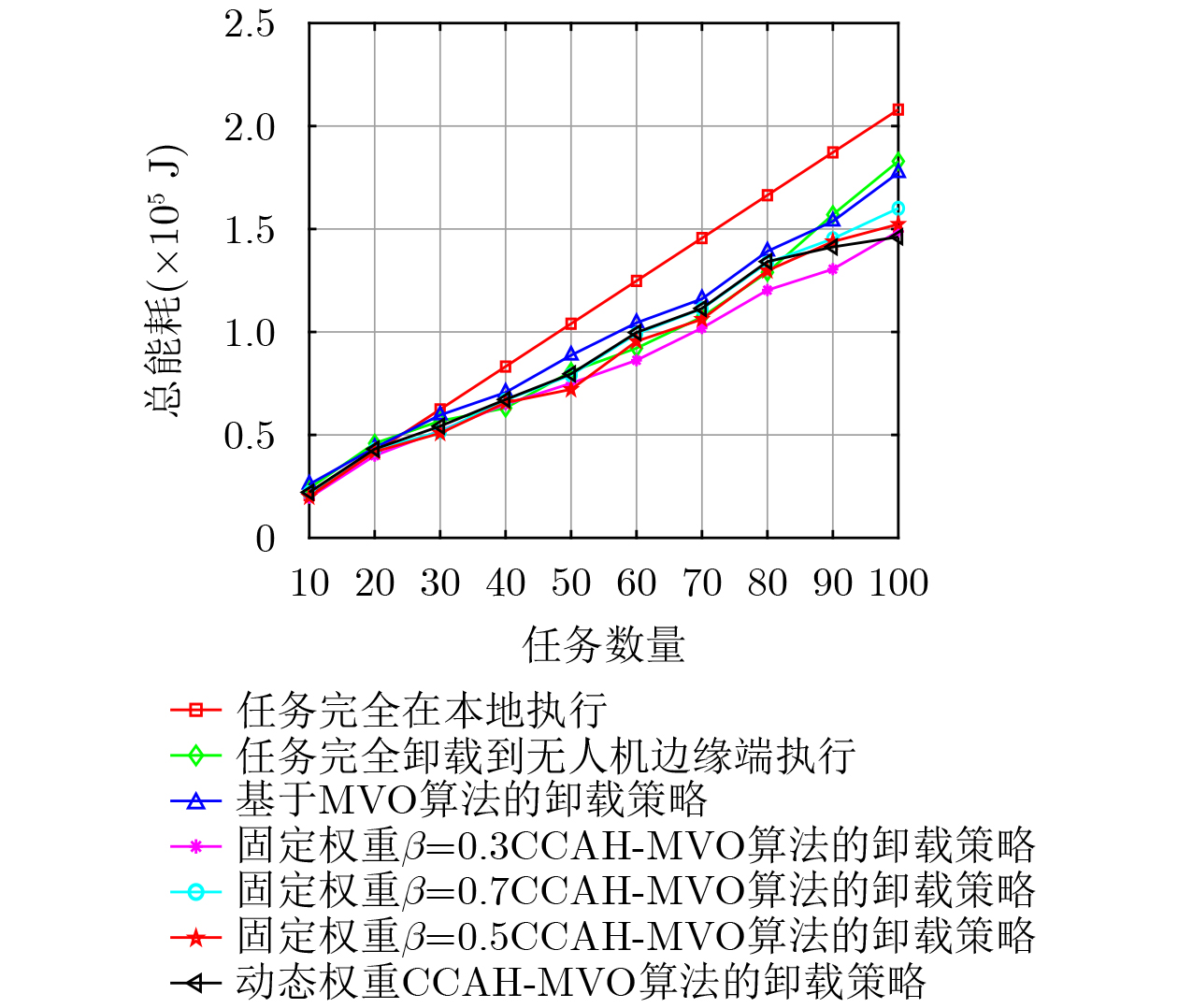
Objective The increasing demands of the Internet of Things (IoT) for computational resources and real-time processing have highlighted the significance of Mobile Edge Computing (MEC). Traditional MEC relies on terrestrial base stations, resulting in coverage blind spots in remote or specialized environments. Unmanned Aerial Vehicle (UAV)-assisted MEC architectures exploit UAVs’ flexible deployment to expand service coverage. However, existing approaches for multi-terminal, multi-UAV scenarios often fail to optimize task offloading latency, system energy consumption, and adaptability to dynamic environments simultaneously. They also overlook optimal UAV selection when terminal devices are covered by multiple UAVs and lack adaptive mechanisms to adjust optimization objectives during task execution. This study addresses these challenges by integrating cooperative caching, offloading decision-making, and resource allocation strategies. Methods A three-tier microcloud-edge-terminal architecture is constructed, comprising a central cloud, multiple UAV edge servers with caching capabilities, and numerous mobile terminal devices. A cooperative caching mechanism reduces transmission delay during task execution. Task offloading adopts a fine-grained partial offloading mode, dividing complex tasks into dependent subtasks modeled through a Directed Acyclic Graph (DAG). The Cooperative Caching-Adaptive Hierarchical MultiVerse Optimizer (CCAH-MVO) algorithm is proposed. A hybrid coding scheme encodes offloading decisions, caching decisions, and resource allocation uniformly. A dynamic weight mechanism adaptively balances delay and energy consumption according to the system’s real-time energy state. Additionally, a UAV selection strategy is implemented for scenarios where terminals are covered by multiple UAVs. By simulating inter-universe material exchange and local refined search, the algorithm efficiently determines the optimal offloading strategy. MATLAB simulations validate the method under various experimental settings. Results and Discussions The simulation scenario involves 50 randomly distributed terminal devices and 5 UAVs in a 400 m × 400 m area. UAVs are deployed above terminal cluster centers, while terminals at cluster edges are simultaneously within the coverage of multiple UAVs ( Fig. 5 ). The optimal UAV for each terminal is selected using the UAV selection function (Fig. 6 ), preventing resource bottlenecks and achieving balanced load distribution. In terms of delay performance, the CCAH-MVO algorithm maintains the lowest task delay across all task volumes, with a gradual increase as the number of tasks grows (Fig. 7 ). Delay under CCAH-MVO is consistently lower than that under fixed-weight strategies across the full task range, demonstrating the effectiveness of the dynamic adaptive mechanism in preserving low latency (Fig. 10 ). For energy consumption, differences among the algorithms are minor when task quantities are low. Under high task loads, the activation of the dynamic weight mechanism flattens the energy consumption curve (Fig. 8 ). When the number of tasks reaches 100, total energy consumption under CCAH-MVO is the lowest among all strategies and remains lower than the fixed-weight approach, reflecting effective control under critical energy conditions (Fig. 9 ). Regarding total system overhead, the CCAH-MVO algorithm consistently achieves the best performance. The gap with fixed-weight strategies widens when task numbers exceed 80, illustrating the dynamic weight mechanism’s collaborative optimization of delay and energy consumption (Fig. 11 ). Overall, by integrating the dynamic weight mechanism and balancing load through UAV selection, the CCAH-MVO algorithm effectively mitigates resource constraints and high task processing overhead in complex, dynamic UAV-assisted MEC environments. It ensures precise coordination between task delay and energy consumption across different load stages.Conclusions The proposed CCAH-MVO framework, incorporating a microcloud-edge-terminal architecture, cooperative caching mechanism, fine-grained partial offloading, dynamic weight adjustment, and UAV selection strategy, effectively addresses resource scheduling in complex multi-UAV MEC environments. Simulations show adaptive optimization of objectives, intelligent energy management, low latency, and reduced total system overhead, improving service stability and user experience. This research provides a practical solution for efficient UAV edge computing in dynamic environments. Future work will explore dynamic energy efficiency optimization and multi-node collaboration while maintaining low-latency performance. -
1 协同缓存自适应的分层多元宇宙优化算法
输入:无人机集合$ \boldsymbol{N} $、终端设备集合$ \boldsymbol{M} $、任务集合$ \boldsymbol{L} $、程序集
合$ \boldsymbol{J} $、系统参数($ {Q}_{n} $,$ F_{n}^{l} $,$ F_{m}^{l} $,$ B $等)输出:最优卸载策略(卸载决策$ \boldsymbol{A} $、缓存策略$ \boldsymbol{C} $、资源分配方案
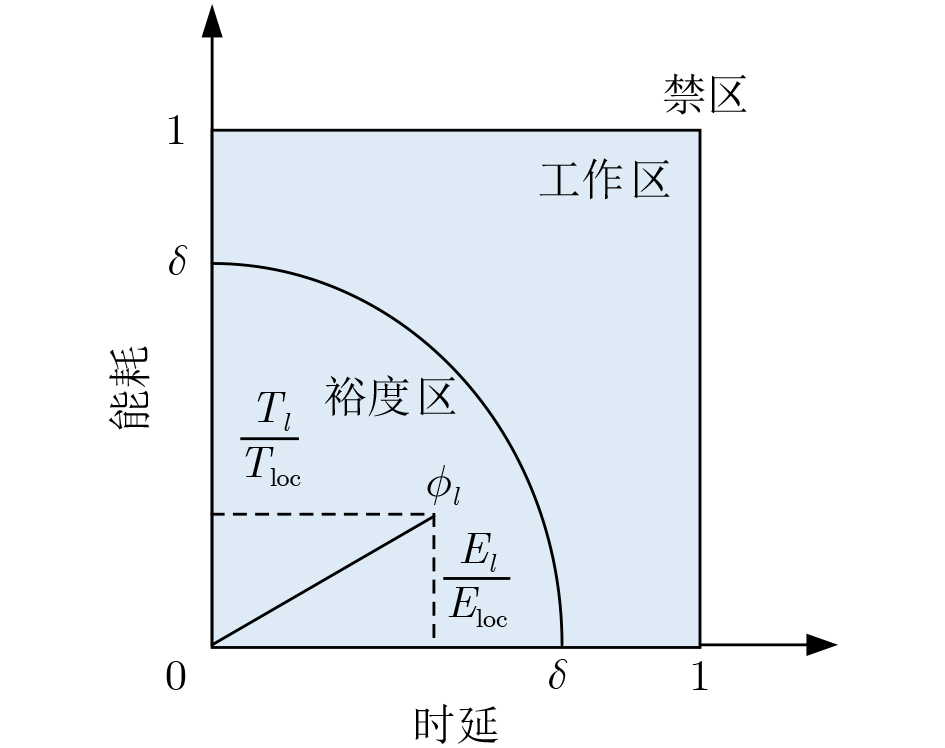
$ \boldsymbol{R} $)1. 初始化参数:迭代次数$ {T}_{\max } $、种群规模$ {P}_{\text{size}} $、裕度区阈值
$ \delta =0.8 $;2. 采用K-means++聚类确定无人机悬停位置; 3. FOR每个宇宙$ i $: 4. 生成混合编码向量$ {\boldsymbol{V}}_{i} $,满足缓存约束; 5. 计算个体适应度值$ {H}_{L}\left({\boldsymbol{V}}_{i}\right)=\displaystyle\sum \nolimits_{i=1}^{k}{H}_{l} $,得到最优宇宙; 6. END FOR 7. WHILE $ t\leq {T}_{\max } $: 8. 更新宇宙膨胀率; 9. 根据$ {T}_{l}/{T}_{\text{loc}}/\sqrt{{\left({T}_{{l}}/{T}_{\text{loc}}\right)}^{2}+{\left({E}_{{l}}/{E}_{\text{loc}}\right)}^{2}} $调整$ \beta $; 10. 计算选择矩阵$ \boldsymbol{S} $; 11. FOR每个宇宙$ i $: 12. 根据式(38)、式(39)、式(40)更新$ a_{k,{n}}^{\text{new}} $, $ c_{j,{n}}^{\text{new}} $, $ b_{m}^{\text{new}} $,更
新当前宇宙;13. 修复缓存容量和任务依赖; 14. END FOR 15. FOR每个宇宙$ i $: 16. 重新计算更新后适应度值; 17. END FOR 18. $ t=t+1 $; 19. END WHILE  下载: 导出CSV
下载: 导出CSV
表 1 仿真参数
仿真参数 参考数值 无人机数量N 5 终端设备数量M 50 信道总带宽B 20 MHz 终端设备传输功率$ {P}_{m} $ 0.2 W 噪声功率密度$ {N}_{0} $ –168 dBm/Hz 参考信道增益$ {h}_{0} $ –60 dB 无线回程链路容量$ {R}_{\mathrm{b}} $ 100 Mbps 覆盖角$ \theta $ $ \text{π} /6 $ 每个子任务数据量$ D_{m}^{\text{in}} $ $ \left[0.2{,}0.4\right] $ MB 任务所需CPU周期数$ {W}_{m} $ $ \left[1.0{,}1.6\right] $ Giga-cycle 终端设备计算能力$ F_{m}^{l} $ 0.5 GHz 无人机计算能力$ F_{n}^{l} $ $ \left[10{,}15\right] $ GHz 无人机飞行速度$ \upsilon $ 15 m/s 无人机传输功率$ P_{\mathrm{u}} $ 0.6 W 能耗系数κ $ 1.0\times {10}^{-27} $ 无人机存储容量$ {Q}_{n} $ 300 MB
下载: 导出CSV
-
[1] PHAM Q V, FANG Fang, HA V N, et al. A survey of multi-access edge computing in 5G and beyond: Fundamentals, technology integration, and state-of-the-art[J]. IEEE Access, 2020, 8: 116974–117017. doi: 10.1109/ACCESS.2020.3001277. [2] HUANG Xiaoyao, ZHANG Baoxian, and LI Cheng. Incentive mechanisms for mobile edge computing: Present and future directions[J]. IEEE Network, 2022, 36(6): 199–205. doi: 10.1109/MNET.107.2100652. [3] 王涵, 文方青, 李兴旺, 等. 大规模MIMO OTFS系统二维稀疏恢复信道估计方法研究[J]. 通信学报, 2025, 46(8): 165–175. doi: 10.11959/j.issn.1000-436x.2025146.WANG Han, WEN Fangqing, LI Xingwang, et al. Two-dimensional sparse recovery method for channel estimation in massive MIMO OTFS systems[J]. Journal on Communications, 2025, 46(8): 165–175. doi: 10.11959/j.issn.1000-436x.2025146. [4] 李兴旺, 田志发, 张建华, 等. IRS辅助NOMA网络下隐蔽通信性能研究[J]. 中国科学: 信息科学, 2024, 54(6): 1502–1515. doi: 10.1360/SSI-2023-0174.LI Xingwang, TIAN Zhifa, ZHANG Jianhua, et al. Performance analysis of covert communication in IRS-assisted NOMA networks[J]. Scientia Sinica Informationis, 2024, 54(6): 1502–1515. doi: 10.1360/SSI-2023-0174. [5] 王义君, 李嘉欣, 闫志颖, 等. 基于深度强化学习的移动边缘计算安全传输策略研究[J]. 通信学报, 2025, 46(4): 272–281. doi: 10.11959/j.issn.1000-436x.2025060.WANG Yijun, LI Jiaxin, YAN Zhiying, et al. Research on secure transport strategy of mobile edge computing based on deep reinforcement learning[J]. Journal on Communications, 2025, 46(4): 272–281. doi: 10.11959/j.issn.1000-436x.2025060. [6] TANG Chaogang, DING Yao, XIAO Shuo, et al. Collaborative service caching, task offloading, and resource allocation in caching-assisted mobile edge computing[J]. IEEE Transactions on Services Computing, 2025, 18(4): 1966–1981. doi: 10.1109/TSC.2025.3586093. [7] 钱志鸿, 王义君. 低空经济赋能者: 智能无人机技术体系综述与展望[J]. 电子与信息学报, 2026, 48(1): 1–33. doi: 10.11999/JEIT251246.QIAN Zhihong and WANG Yijun. Intelligent unmanned aerial vehicles for low-altitude economy: A review of the technology framework and future prospects[J]. Journal of Electronics & Information Technology, 2026, 48(1): 1–33. doi: 10.11999/JEIT251246. [8] DENG Yiqin, ZHANG Haixia, CHEN Xianhao, et al. UAV-assisted MEC with an expandable computing resource pool: Rethinking the UAV deployment[J]. IEEE Wireless Communications, 2024, 31(5): 110–116. doi: 10.1109/MWC.015.2300427. [9] SUN Lu, LIU Ziqian, NING Zhaolong, et al. Multi-agent q-net enhanced coevolutionary algorithm for resource allocation in emergency human-machine fusion UAV-MEC system[J]. IEEE Transactions on Automation Science and Engineering, 2025, 22: 4473–4489. doi: 10.1109/TASE.2024.3409551. [10] BASHARAT M, NAEEM M, KHATTAK A M, et al. Digital-twin-assisted task offloading in UAV-MEC networks with energy harvesting for IoT devices[J]. IEEE Internet of Things Journal, 2024, 11(23): 37550–37561. doi: 10.1109/JIOT.2024.3440061. [11] ZHOU Fuhui, WU Yongpeng, HU R Q, et al. Computation rate maximization in UAV-enabled wireless-powered mobile-edge computing systems[J]. IEEE Journal on Selected Areas in Communications, 2018, 36(9): 1927–1941. doi: 10.1109/JSAC.2018.2864426. [12] LIU Boyang, WAN Yiyao, ZHOU Fuhui, et al. Resource allocation and trajectory design for MISO UAV-assisted MEC networks[J]. IEEE Transactions on Vehicular Technology, 2022, 71(5): 4933–4948. doi: 10.1109/TVT.2022.3140833. [13] PENG Chaoda, HUANG Xumin, WU Yuan, et al. Constrained multi-objective optimization for UAV-enabled mobile edge computing: Offloading optimization and path planning[J]. IEEE Wireless Communications Letters, 2022, 11(4): 861–865. doi: 10.1109/LWC.2022.3149007. [14] YU Sicong, ZHENG Huiji, and MA Caihong. MEC-enabled fine-grained task offloading for UAV networks in urban environments[J]. Sustainability, 2022, 14(21): 13809. doi: 10.3390/su142113809. [15] LI Hui, LI Xiuhua, FAN Qilin, et al. Distributed DNN inference with fine-grained model partitioning in mobile edge computing networks[J]. IEEE Transactions on Mobile Computing, 2024, 23(10): 9060–9074. doi: 10.1109/TMC.2024.3357874. [16] CHEN Xing, LI Ming, ZHONG Hao, et al. FUNOff: Offloading applications at function granularity for mobile edge computing[J]. IEEE Transactions on Mobile Computing, 2024, 23(2): 1717–1734. doi: 10.1109/TMC.2023.3240741. [17] DENG Min, YAO Zhiqiang, LI Xingwang, et al. Dynamic multi-objective AWPSO in DT-assisted UAV cooperative task assignment[J]. IEEE Journal on Selected Areas in Communications, 2023, 41(11): 3444–3460. doi: 10.1109/JSAC.2023.3310056. [18] SACCO A, ESPOSITO F, MARCHETTO G, et al. A self-learning strategy for task offloading in UAV networks[J]. IEEE Transactions on Vehicular Technology, 2022, 71(4): 4301–4311. doi: 10.1109/TVT.2022.3144654. [19] CHEN Haosheng, GUI Haixia, WANG Jiahuan, et al. Computation offloading optimization for UAV-based cloud-edge collaborative task scheduling strategy[J]. IEEE Transactions on Cognitive Communications and Networking, 2025, 11(6): 4240–4253. doi: 10.1109/TCCN.2025.3544822. [20] ALYASSI R, KHONJI M, KARAPETYAN A, et al. Autonomous recharging and flight mission planning for battery-operated autonomous drones[J]. IEEE Transactions on Automation Science and Engineering, 2023, 20(2): 1034–1046. doi: 10.1109/TASE.2022.3175565. [21] 王亭惠, 陈桂芬. 基于DP-HAFS算法的移动边缘计算卸载策略[J]. 计算机应用研究, 2023, 40(4): 1184–1188. doi: 10.19734/j.issn.1001-3695.2022.08.0419.WANG Tinghui and CHEN Guifen. Mobile edge computing offloading strategy based on DP-HAFS algorithm[J]. Application Research of Computers, 2023, 40(4): 1184–1188. doi: 10.19734/j.issn.1001-3695.2022.08.0419. [22] LI Ze. Enhanced fault localization in energy systems using an improved MVO algorithm and multistrategy optimization[J]. IEEE Access, 2025, 13: 50367–50378. doi: 10.1109/ACCESS.2025.3552761. [23] LI Zhiyang, CHEN Ming, CHEN Jinli, et al. Delay efficient caching enabled hierarchical mobile edge computing networks[J]. IEEE Transactions on Communications, 2025, 73(10): 9087–9101. doi: 10.1109/TCOMM.2025.3562526. [24] GUL F, RAHIMAN W, ALHADY S S N, et al. Meta-heuristic approach for solving multi-objective path planning for autonomous guided robot using PSO–GWO optimization algorithm with evolutionary programming[J]. Journal of Ambient Intelligence and Humanized Computing, 2021, 12(7): 7873–7890. doi: 10.1007/s12652-020-02514-w. [25] SARI D W, DWIJAYANTI S, and SUPRAPTO B Y. Integration of regression-based guidance ant for enhanced exploration and convergence in ant colony optimization (ACO)[J]. IEEE Access, 2025, 13: 107621–107630. doi: 10.1109/ACCESS.2025.3581425. -








图(11) / 表(2)
计量
- 文章访问数: 221
- HTML全文浏览量: 78
- PDF下载量: 34
- 被引次数: 0
 下载:
下载:
