

Data-driven Sliding-mode Disturbance-rejection Formation Control for Quadrotor UAV Swarms Under Uncertain Disturbances
-
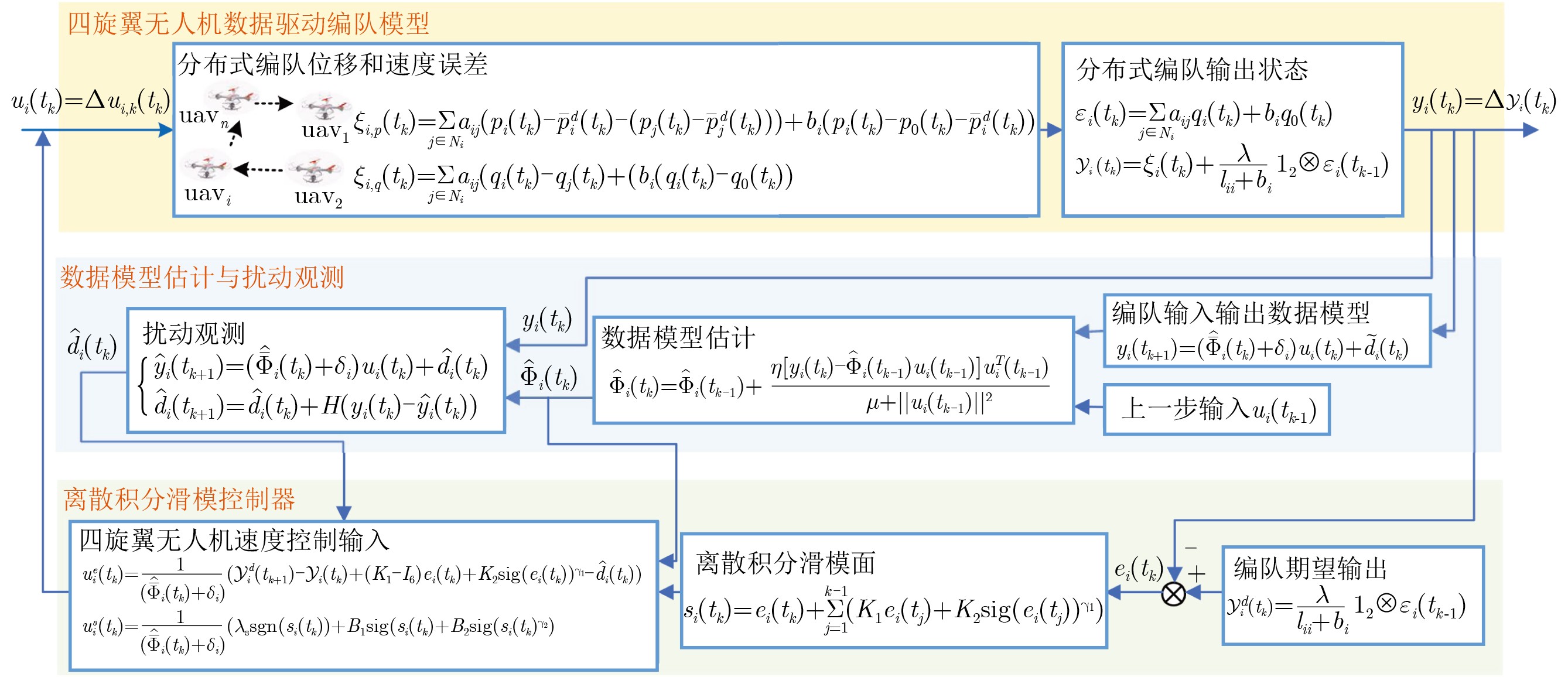
摘要: 不确定扰动环境下四旋翼无人机(UAV)集群往往面临建模不精确带来的编队控制难题,该文提出一种基于数据驱动的四旋翼无人机集群滑模抗扰编队控制方法。首先,根据四旋翼无人机及其邻居节点的输入输出状态,采用动态线性化方法建立了无人机集群数据驱动编队模型;其次,基于数据驱动模型设计了扩张状态观测器与积分滑模编队控制器,用于对不确定干扰进行在线估计与滑模抗扰编队;最后,对基于数据驱动的无人机集群滑模抗扰编队系统进行了稳定性分析,得到了只需通信拓扑连通和扰动有界的编队稳定性条件。Gazebo仿真与实验结果均表明,所提策略在无人机模型未知且在7 m/s风速的不确定扰动下,集群编队误差优于0.1 m,较传统基于模型控制的四旋翼无人机编队方法和现有数据驱动方法编队误差降低了41%,编队响应时间缩短了40%。Abstract:
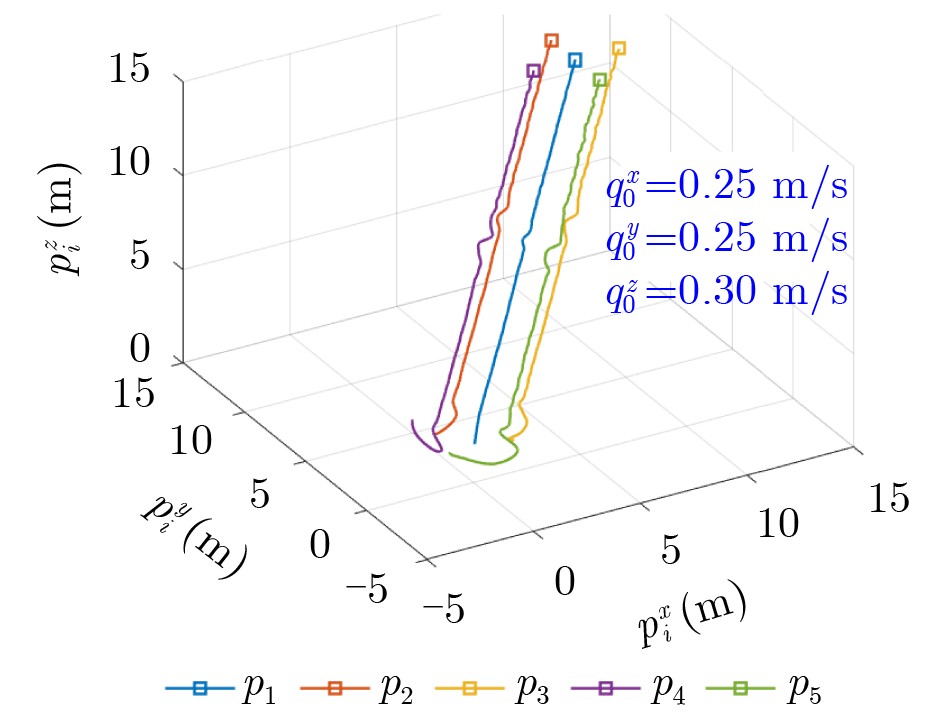
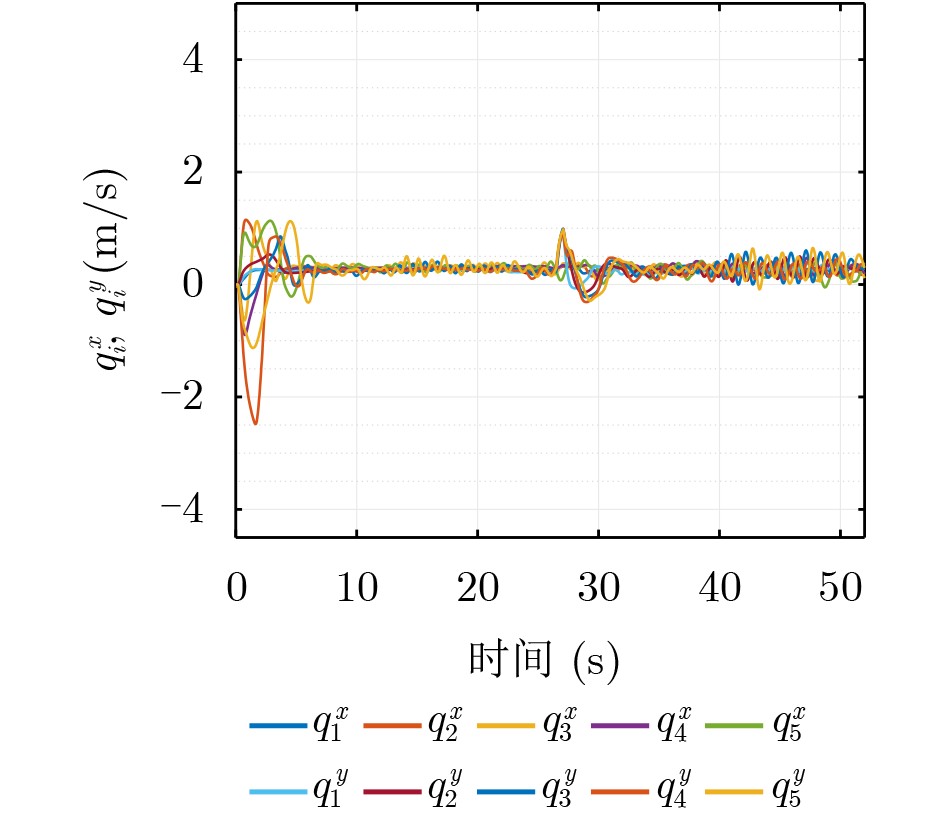
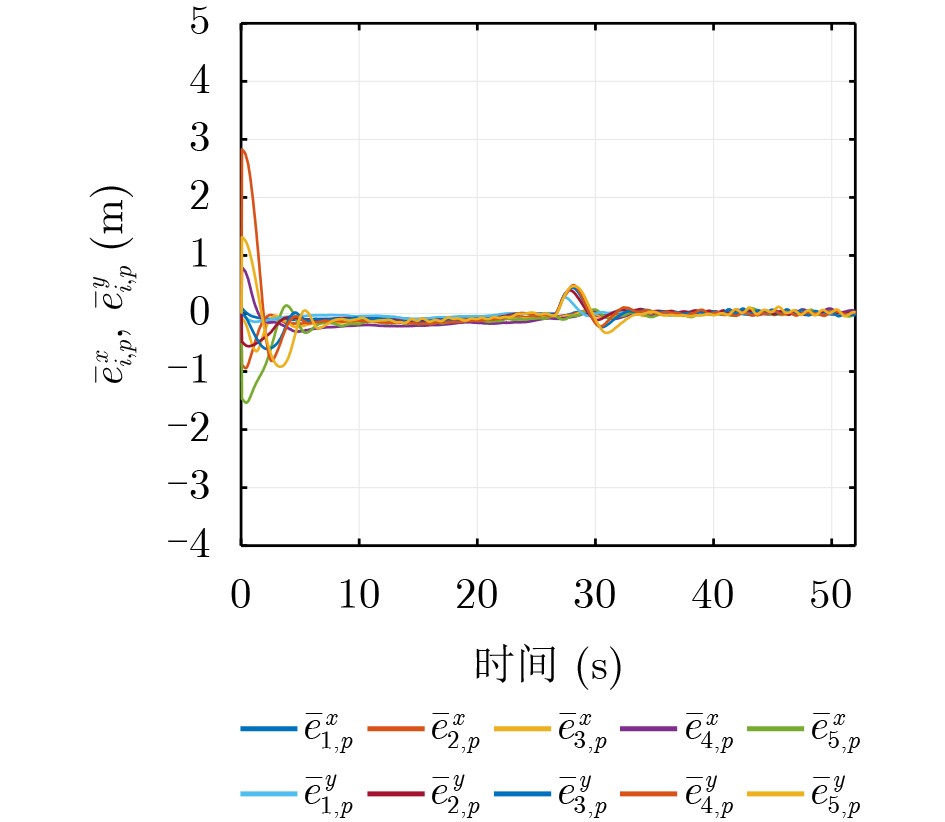
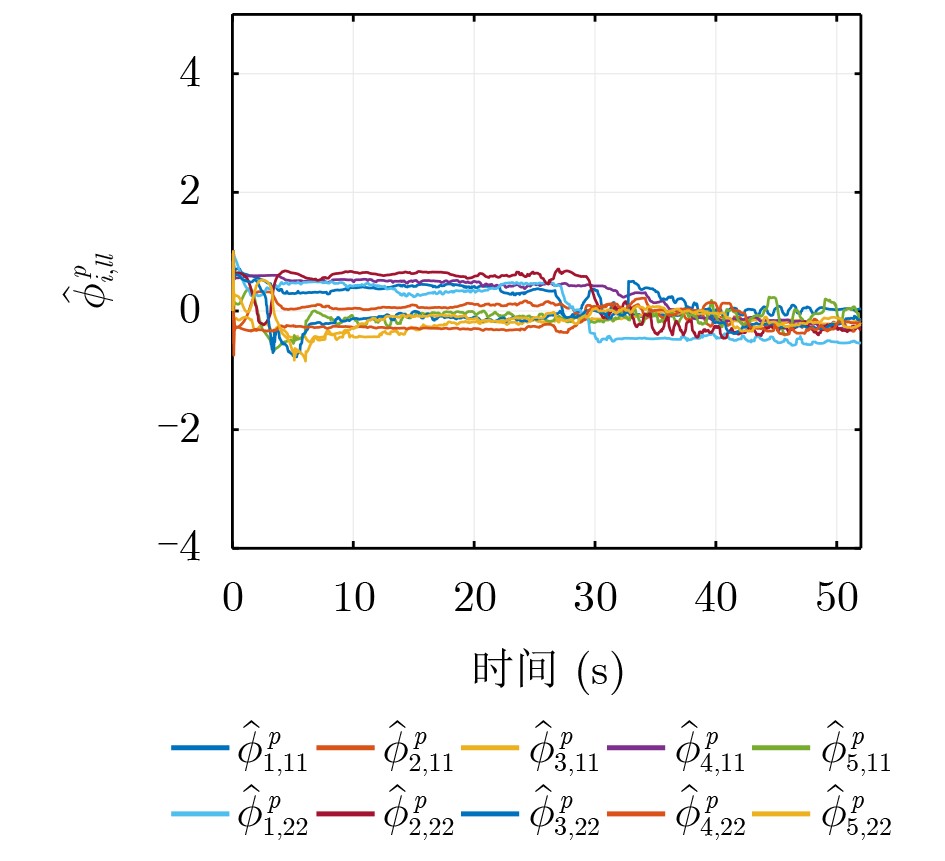
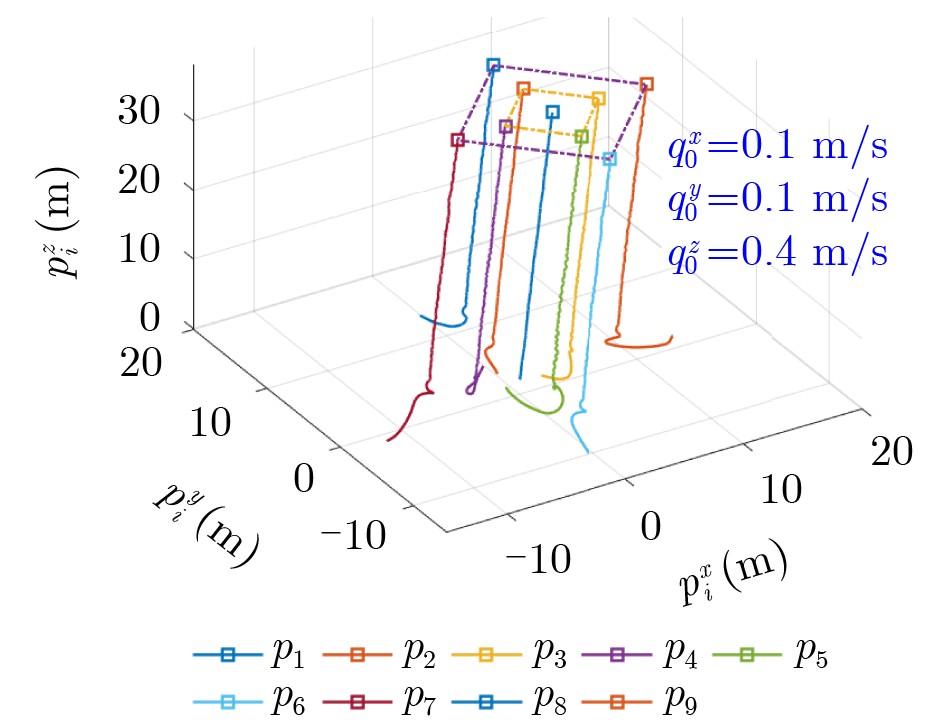
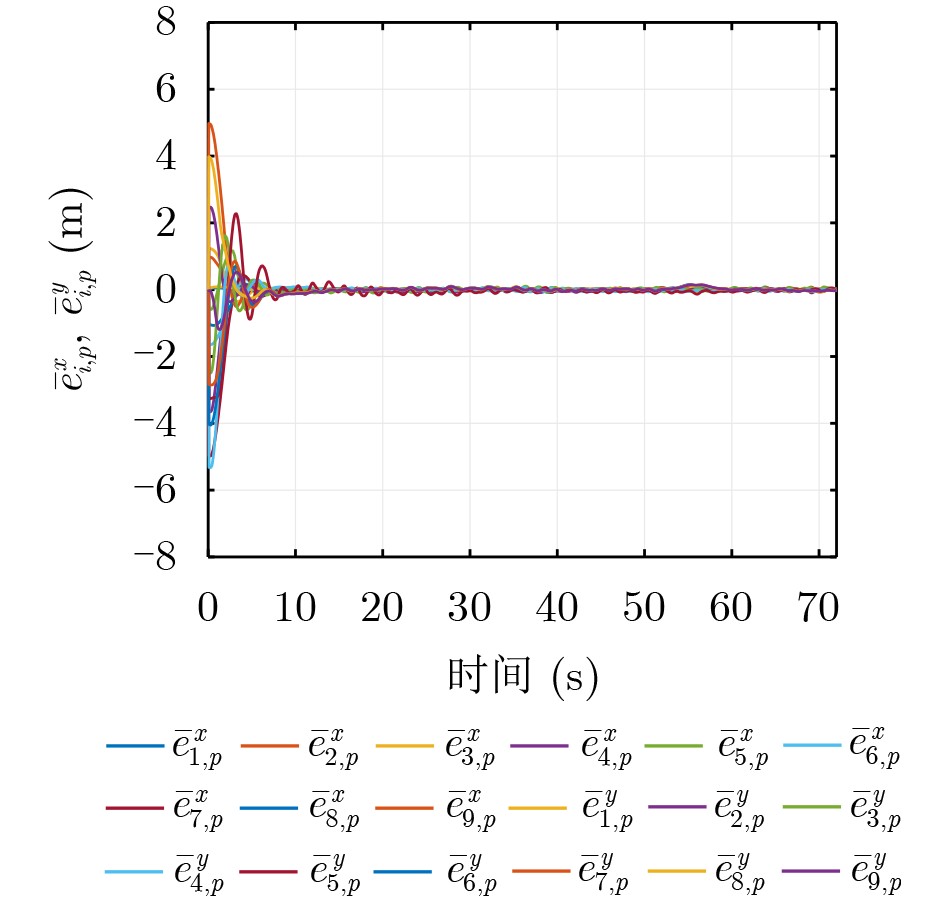
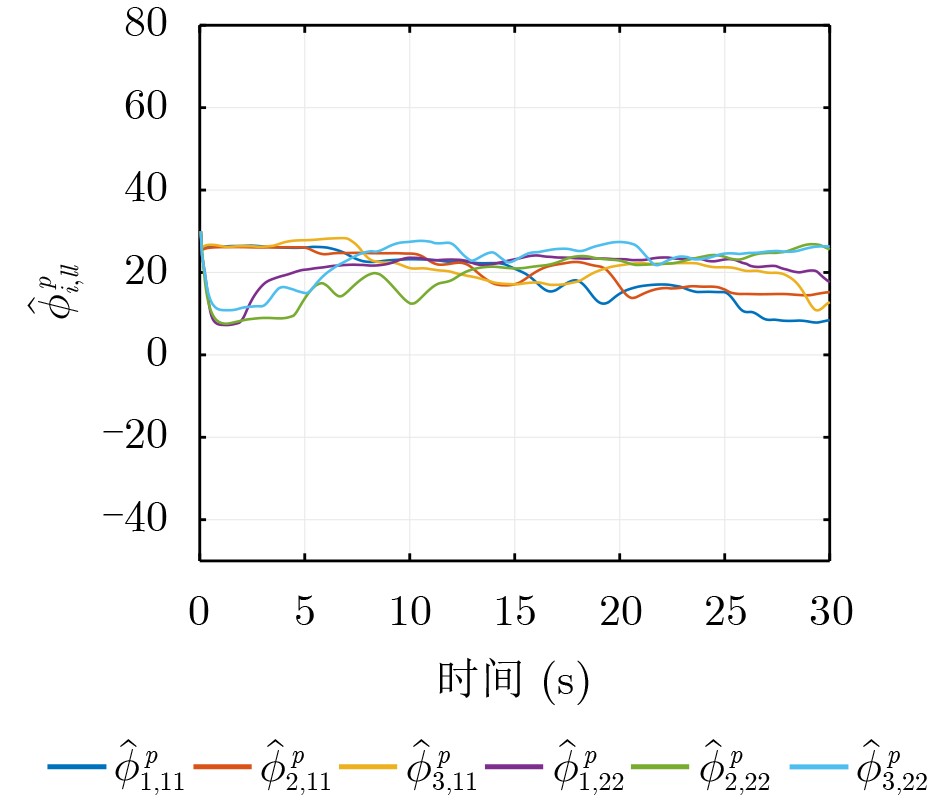
Objective Quadrotor Unmanned Aerial Vehicle (UAV) cooperative formation can increase payload capacity and extend the operational range. However, quadrotor UAVs are highly nonlinear and underactuated systems. Differences in size and actuator hardware further weaken the effectiveness of model-based formation-control methods. Therefore, disturbance-rejection formation control is needed for quadrotor UAV swarms with unknown internal models and uncertain external disturbances. Methods To address the difficulty of precise modeling for quadrotor UAV swarm formation under uncertain disturbances, this paper proposes a data-driven sliding-mode disturbance-rejection formation control method. First, a data-driven formation-control model is established using the input and output states of each UAV and its neighboring UAVs. Then, an extended state observer and an integral sliding-mode formation controller are designed to estimate uncertain disturbances online and achieve robust formation control. Finally, stability analysis is conducted to derive sufficient conditions under which all UAVs achieve sliding-mode disturbance-rejection formation. The proposed method is verified through simulations and experiments under an unknown system model and uncertain disturbances. Results and Discussions The simulation results show that multiple quadrotor UAVs can maintain the desired formation geometry in a wind-disturbed environment ( Fig. 4 ). The formation position error converges to within 0.1 m in 15 s and reconverges rapidly after a 7 m/s gust is applied (Fig. 6 ). The velocity curves also show rapid convergence among the UAVs (Fig. 5 ). The experimental results indicate that three UAVs can follow the trajectory of the virtual leader while maintaining the desired triangular formation (Fig. 17 ). The formation error is mostly kept within 0.1 m (Fig. 18 ). When the observation matrix fluctuates strongly between 10 s and 20 s, the corresponding formation error is relatively large. When the observation matrix curve becomes smoother between 20 s and 30 s, the formation error also decreases (Fig. 20 ). Compared with traditional model-based formation-control methods and existing data-driven methods, the proposed method reduces the formation error by 41% and shortens the formation response time by 40%.Conclusions This paper proposes a data-driven sliding-mode disturbance-rejection formation control method for quadrotor UAV swarms with unknown internal models and uncertain external disturbances. Under an unknown quadrotor UAV model and a 7 m/s wind disturbance, the proposed method keeps the formation error below 0.1 m. It also reduces the formation error by 41% and shortens the formation response time by 40% compared with traditional model-based formation-control methods and existing data-driven methods. Future work will study multilayer data-driven formation control for heterogeneous UAV-UGV swarm systems. It will also optimize computational cost and scalability in large-scale and complex application scenarios. -
Key words:
- Quadrotor UAV swarm /
- Data-driven formation-control /
- Sliding mode control
-
表 1 不同风扰场景下编队误差(m)
风扰均值(m/s) t=2 s t=5 s t=10 s t=30 s t=50 s t=70 s 7 1.842 0.76 0.098 0.089 0.085 0.082 10 2.01 1.136 0.138 0.075 0.086 0.088 13 1.91 1.49 0.152 0.078 0.084 0.096 15 2.59 1.785 0.236 0.143 0.118 0.125  下载: 导出CSV
下载: 导出CSV
-
[1] 陈佳美, 孙慧雯, 李玉峰, 等. 基于双深度Q网络算法的无人机辅助密集网络资源优化策略[J]. 电子与信息学报, 2025, 47(8): 2621–2629. doi: 10.11999/JEIT250021.CHEN Jiamei, SUN Huiwen, LI Yufeng, et al. Double deep Q network algorithm-based unmanned aerial vehicle-assisted dense network resource optimization strategy[J]. Journal of Electronics & Information Technology, 2025, 47(8): 2621–2629. doi: 10.11999/JEIT250021. [2] LI Qianxiong, LU Xiaoqing and WANG Yaonan. A novel hierarchical distributed robust formation control strategy for multiple quadrotor aircrafts[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2025, 55(10): 6450–6462. doi: 10.1109/TSMC.2025.3585704. [3] LI Qianxiong, LU Xiaoqing, WANG Yaonan, et al. A hierarchical cross-domain formation strategy for heterogeneous UGV-UAVs with uncertainties[J]. IEEE Transactions on Industrial Electronics, 2026, 73(3): 4224–4237. doi: 10.1109/TIE.2025.3594438. [4] 初航, 董志浩, 曹杰, 等. 面向无人机辅助电力巡检的短包通信资源优化[J]. 电子与信息学报, 2026, 48(1): 78–85. doi: 10.11999/JEIT250852.CHU Hang, DONG Zhihao, CAO Jie, et al. Optimization of short packet communication resources for UAV assisted power inspection[J]. Journal of Electronics & Information Technology, 2026, 48(1): 78–85. doi: 10.11999/JEIT250852. [5] 汤新民, 李帅, 顾俊伟, 等. 一种无人机冲突探测与避让系统决策方法[J]. 电子与信息学报, 2025, 47(5): 1301–1309. doi: 10.11999/JEIT240503.TANG Xinmin, LI Shuai, GU Junwei, et al. A decision-making method for UAV conflict detection and avoidance system[J]. Journal of Electronics & Information Technology, 2025, 47(5): 1301–1309. doi: 10.11999/JEIT240503. [6] LU Xiaoqing, LI Qianxiong and LAI Jingang. Double-integrator control for MASs with small switching dwell time[J]. ISA Transactions, 2021, 114: 217–229. doi: 10.1016/j.isatra.2020.12.060. [7] ZHAO Shiyu. Affine formation maneuver control of multiagent systems[J]. IEEE Transactions on Automatic Control, 2018, 63(12): 4140–4155. doi: 10.1109/TAC.2018.2798805. [8] ZHOU Dingjiang, WANG Zijian and SCHWAGER Mac. Agile coordination and assistive collision avoidance for quadrotor swarms using virtual structures[J]. IEEE Transactions on Robotics, 2018, 34(4): 916–923. doi: 10.1109/TRO.2018.2857477. [9] LIN Jie, MIAO Zhiqiang, WANG Yaonan, et al. Vision-based safety-critical landing control of quadrotors with external uncertainties and collision avoidance[J]. IEEE Transactions on Control Systems Technology, 2024, 32(4): 1310–1322. doi: 10.1109/TCST.2024.3363372. [10] DU Haibo, ZHU Wenwu, WEN Guanghui, et al. Distributed formation control of multiple quadrotor aircraft based on nonsmooth consensus algorithms[J]. IEEE Transactions on Cybernetics, 2019, 49(1): 342–353. doi: 10.1109/TCYB.2017.2777463. [11] LIAN Shikang, MENG Wei, LIN Zemin, et al. Adaptive attitude control of a quadrotor using fast nonsingular terminal sliding mode[J]. IEEE Transactions on Industrial Electronics, 2022, 69(2): 1597–1607. doi: 10.1109/TIE.2021.3057015. [12] WANG Bohui. A distributed adaptive observer-based approach to synchronization of heterogeneous nonmonotonic nonlinear systems for formation application[J]. IEEE Transactions on Automatic Control, 2024, 69(9): 6137–6152. doi: 10.1109/TAC.2024.3392599. [13] QI Juntong, GUO Jinjin, WANG Mingming, et al. Formation tracking and obstacle avoidance for multiple quadrotors with static and dynamic obstacles[J]. IEEE Robotics and Automation Letters, 2022, 7(2): 1713–1720. doi: 10.1109/LRA.2022.3140830. [14] XU Linxing, WANG Yulong, WANG Xiaofan, et al. Distributed active disturbance rejection formation tracking control for quadrotor UAVs[J]. IEEE Transactions on Cybernetics, 2024, 54(8): 4678–4689. doi: 10.1109/TCYB.2023.3324752. [15] BARROS DOS SANTOS S R, GIVIGI S N, and NASCIMENTO C L. Autonomous construction of multiple structures using learning automata: Description and experimental validation[J]. IEEE Systems Journal, 2015, 9(4): 1376–1387. doi: 10.1109/JSYST.2014.2374334. [16] YANG Yongliang, MODARES H, WUNSCH D C. , et al. Leader-follower output synchronization of linear heterogeneous systems with active leader using reinforcement learning[J]. IEEE Transactions on Neural Networks and Learning Systems, 2018, 29(6): 2139–2153. doi: 10.1109/TNNLS.2018.2803059. [17] OUYANG Yuncheng, XUE Lei, DONG Lu, et al. Neural network-based finite-time distributed formation-containment control of two-layer quadrotor UAVs[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2022, 52(8): 4836–4848. doi: 10.1109/TSMC.2021.3103013. [18] KONG Linghuan, HE Wei, DONG Yiting, et al. Asymmetric bounded neural control for an uncertain robot by state feedback and output feedback[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2021, 51(3): 1735–1746. doi: 10.1109/TSMC.2019.2901277. [19] SHAO Shuyi and CHEN Mou. Adaptive neural discrete-time fractional-order control for a UAV system with prescribed performance using disturbance observer[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2021, 51(2): 742–754. doi: 10.1109/TSMC.2018.2882153. [20] BU Xuhui, HOU Zhongsheng and ZHANG Hongwei. Data-driven multiagent systems consensus tracking using model free adaptive control[J]. IEEE Transactions on Neural Networks and Learning Systems, 2018, 29(5): 1514–1524. doi: 10.1109/TNNLS.2017.2673020. [21] HOU Zhongsheng and XIONG Shuangshuang. On model-free adaptive control and its stability analysis[J]. IEEE Transactions on Automatic Control, 2019, 64(11): 4555–4569. doi: 10.1109/TAC.2019.2894586. [22] HOU Mingdong, WANG Yinsong and HAN Yaozhen. Data-driven discrete terminal sliding mode decoupling control method with prescribed performance[J]. Journal of the Franklin Institute, 2021, 358(13): 6612–6633. doi: 10.1016/j.jfranklin.2021.06.025. [23] CHI Ronghu, HUI Yu, HUANG Biao, et al. Adjacent-agent dynamic linearization-based iterative learning formation control[J]. IEEE Transactions on Cybernetics, 2020, 50(10): 4358–4369. doi: 10.1109/TCYB.2019.2899654. [24] LIANG Jiaqi, BU Xuhui, CUI Lizhi, et al. Data-driven bipartite formation for a class of nonlinear MIMO multiagent systems[J]. IEEE Transactions on Neural Networks and Learning Systems, 2023, 34(6): 3161–3173. doi: 10.1109/TNNLS.2021.3111893. [25] TAN Haoran, ZHANG Xueming, WANG Yaonan, et al. Data-driven bipartite consensus control for large workpieces rotation of nonlinear multi-robot systems[J]. IEEE/CAA Journal of Automatica Sinica, 2025, 12(6): 1144–1158. doi: 10.1109/JAS.2024.124938. -
















图(22) / 表(1)
计量
- 文章访问数: 7
- HTML全文浏览量: 4
- PDF下载量: 0
- 被引次数: 0
 下载:
下载:
