

Optimal Weighted Subspace Fitting-based Direct Position Determination with HF/VHF Collaboration
-
摘要: 针对超视距多目标的定位问题,该文提出一种基于最优加权子空间拟合(OWSF)的短波超短波协同直接定位(DPD)方法。首先建立了超视距定位场景下短波超短波信号传播模型,短波模型是通过电离层反射的二维到达方向(DoA)模型,涵盖了方位角和俯仰角信息;超短波模型是基于运动阵列观测的空时信号扩展模型,包含一维到达角度和多普勒频率信息。与现有依赖单频段信号的定位方法不同,新方法将两种观测信号的信号子空间与噪声子空间加权融合,实现了两种定位频段信号的优势互补,从而显著提高了定位精度。此外,该文还推导了地球椭球约束条件下定位估计误差克拉美罗界(CRB)。仿真结果显示,该方法在高信噪比条件下能够逼近克拉美罗界,且相较于已有算法具有更强的空间分辨能力,在低信噪比条件下具有显著的定位精度优势。Abstract:
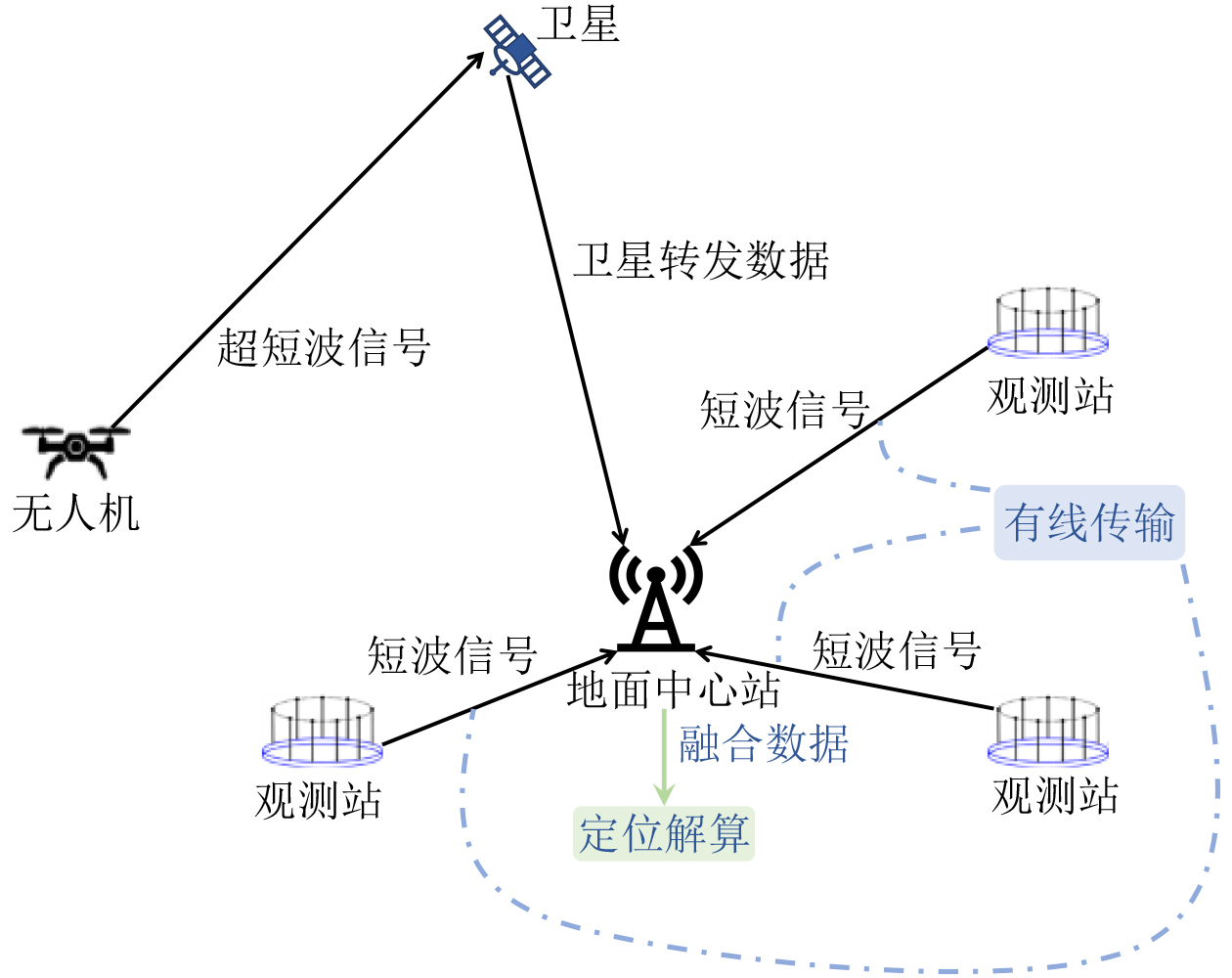
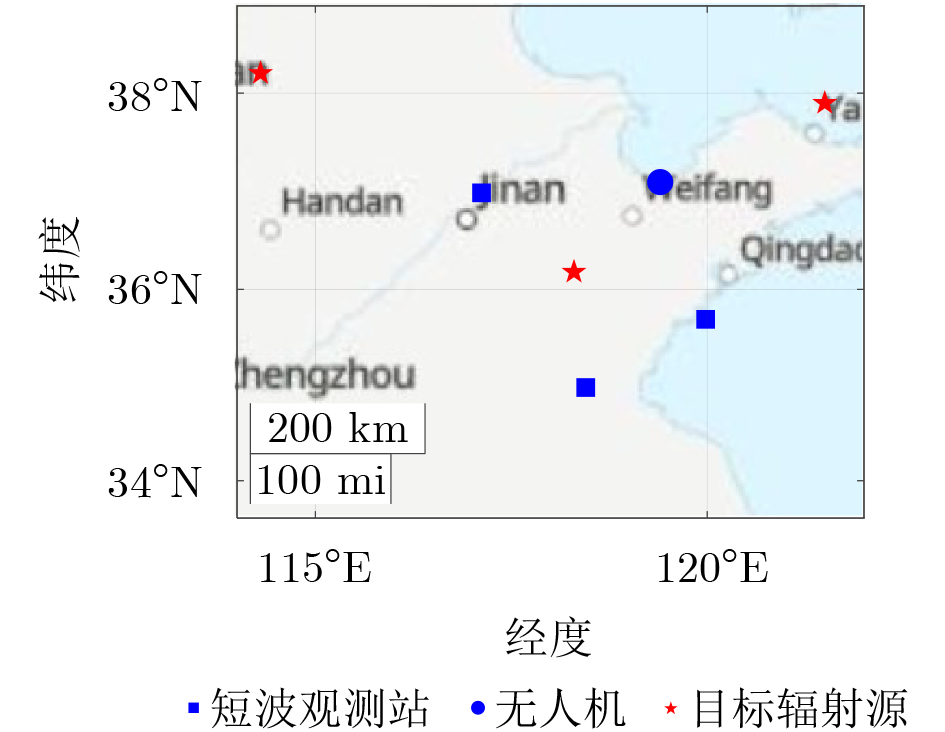
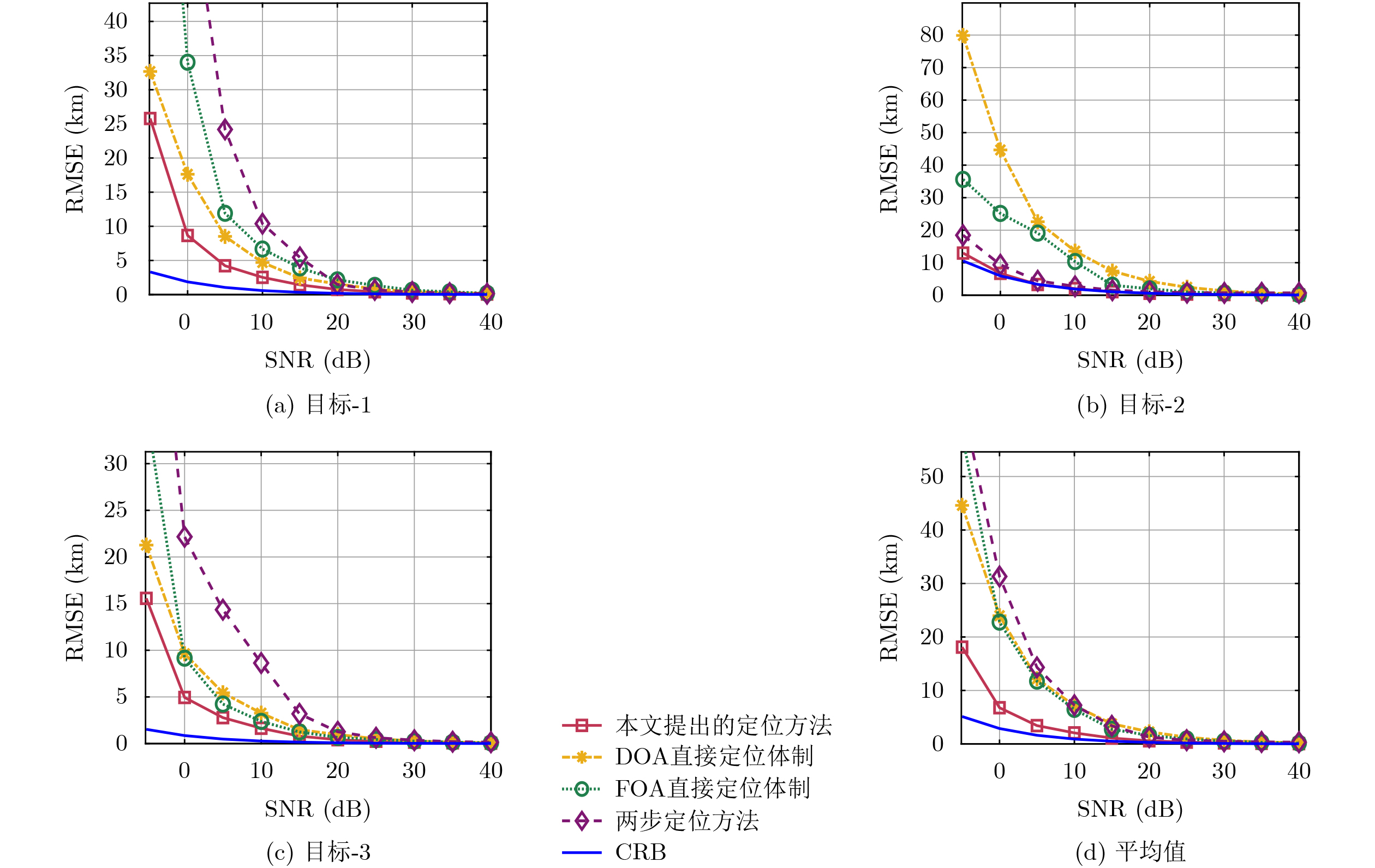
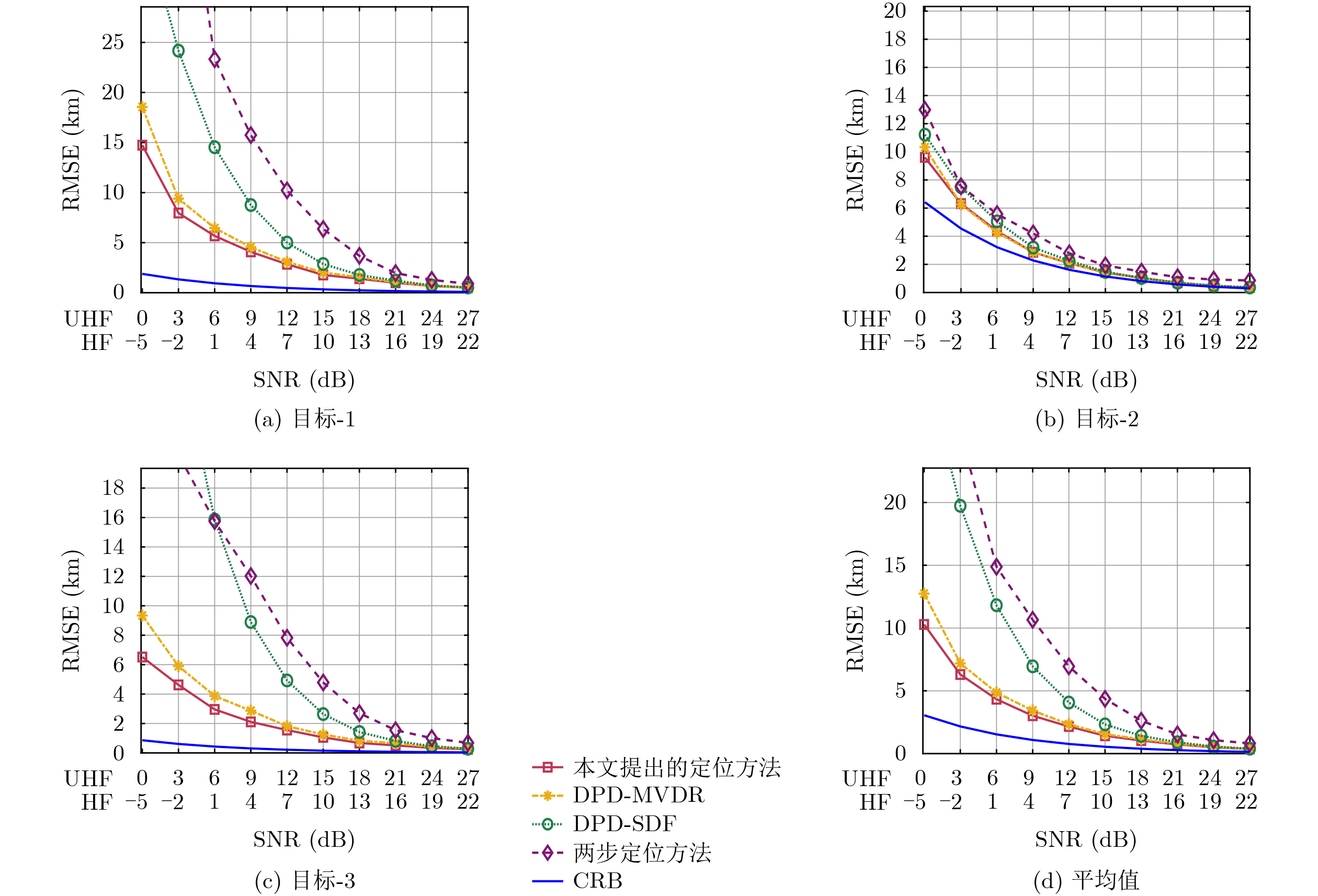
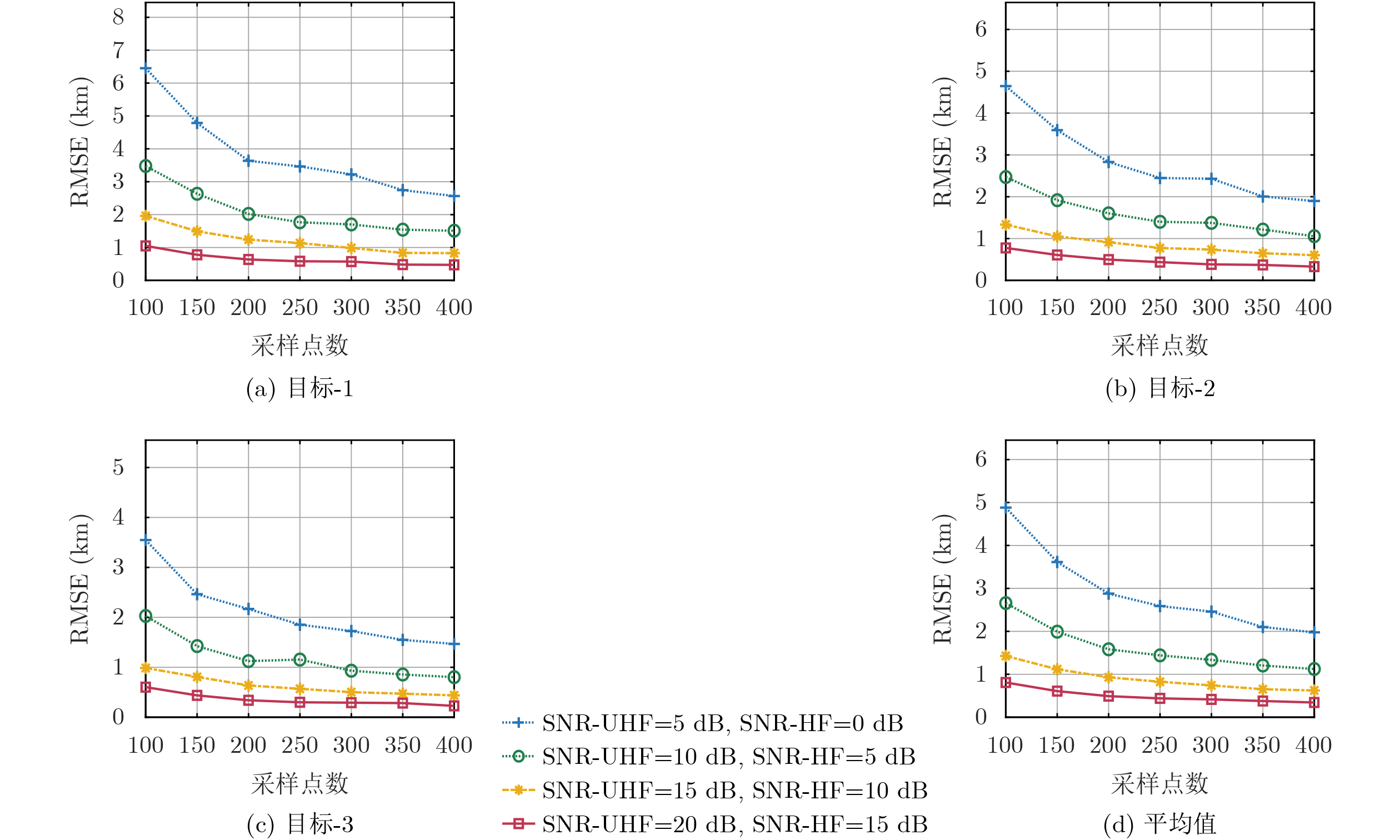
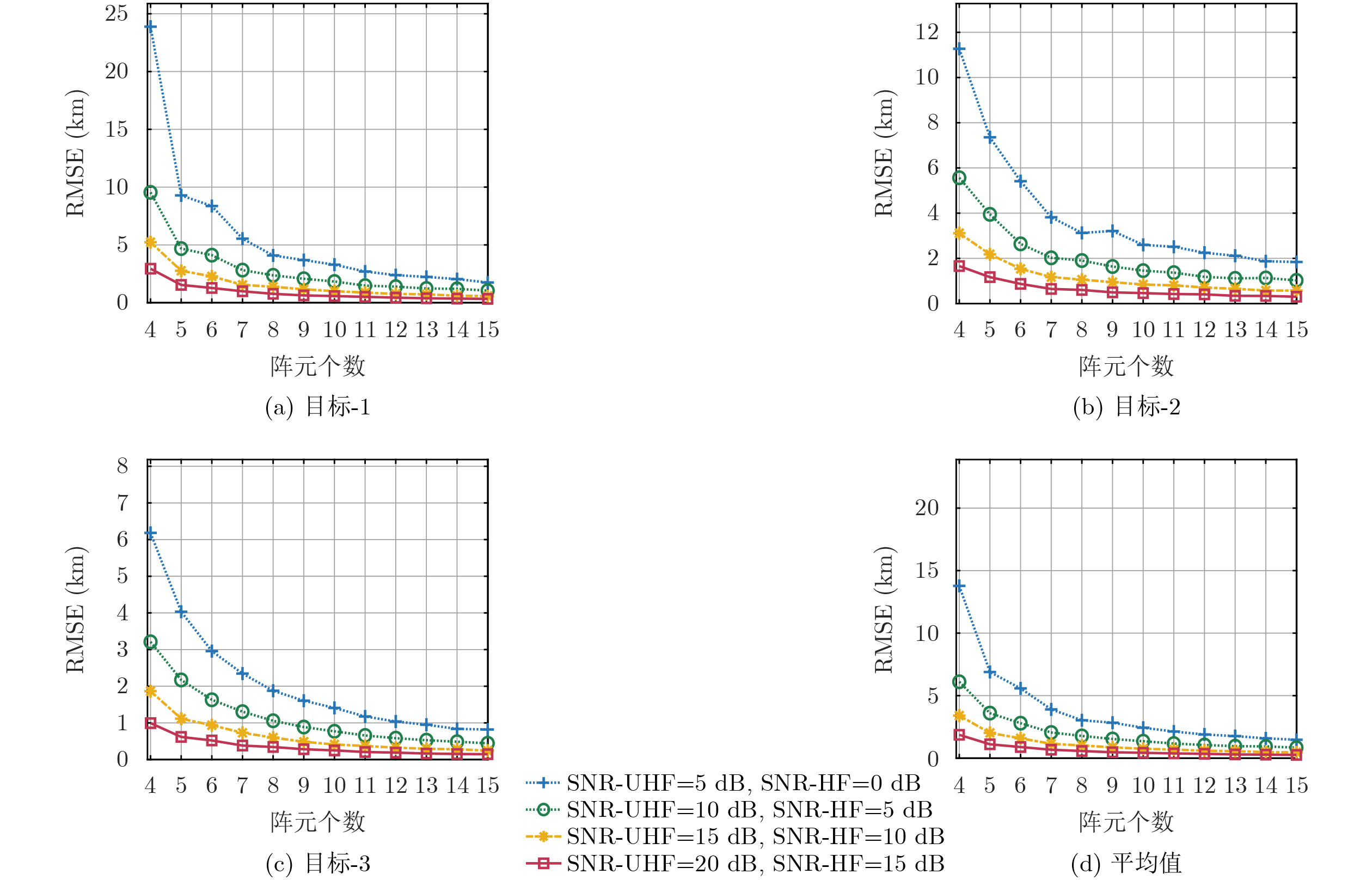
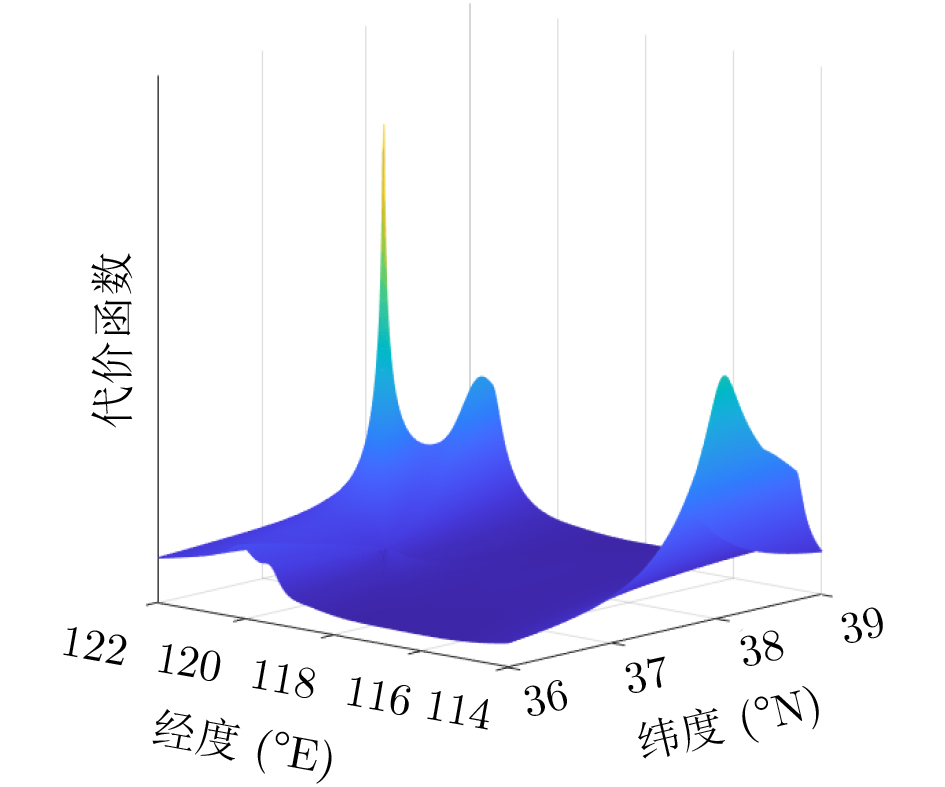
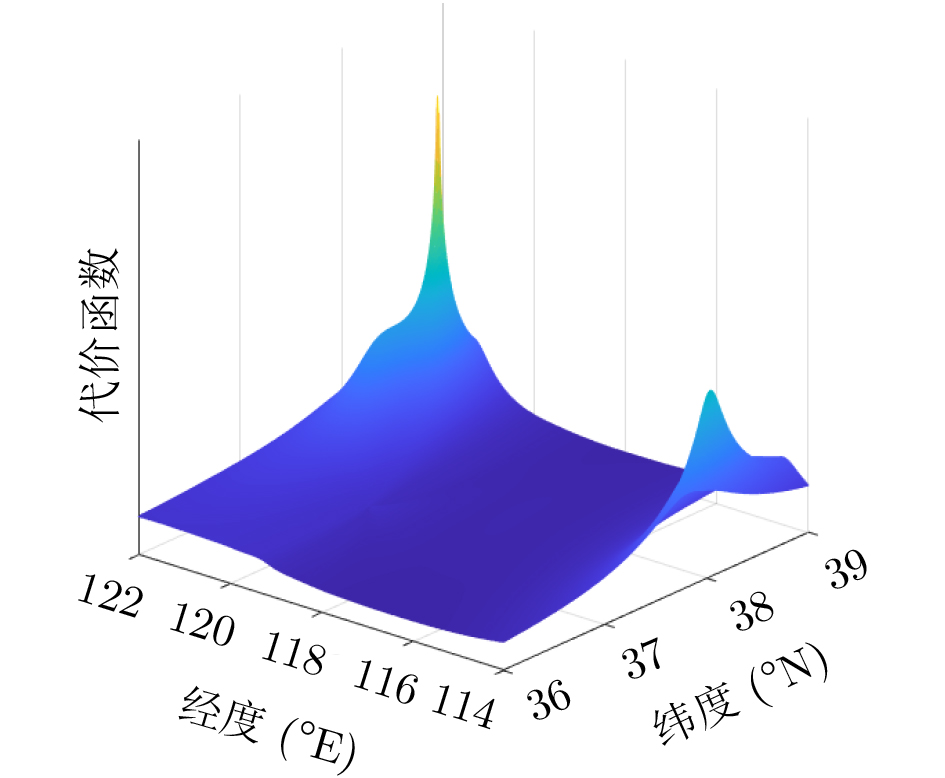
Objective Passive localization is essential for target detection, navigation, and track tracking, particularly in military applications involving maritime and aerial targets. These targets often transmit across multiple frequency bands, including shortwave High Frequency(HF) and Very High Frequency (VHF). Existing localization methods largely rely on single-band approaches or two-step positioning techniques. Single-band methods underutilize the positional information available across different bands, while two-step methods lose information during intermediate parameter estimation (e.g., Direction-Of-Arrival (DOA); Time-Difference-Of-Arrival (TDOA)), reducing localization accuracy. Collaborative fusion of HF signals (via ionospheric reflection) and VHF signals (via Doppler effects from moving arrays) has been rarely addressed. To overcome low positioning accuracy and limited spatial resolution in over-the-horizon multi-target scenarios, this study proposes a novel collaborative Direct Position Determination (DPD) method designed to integrate the complementary strengths of HF and VHF signals, enhancing localization precision and robustness in complex electromagnetic environments. Methods An Optimal Weighted Subspace Fitting (OWSF) DPD algorithm is proposed. Comprehensive signal propagation models are established for heterogeneous observation platforms ( Fig. 1 ). HF signal propagation is modeled using a two-dimensional DOA framework based on ionospheric reflection, incorporating azimuth and elevation angles to handle nonlinear over-the-horizon propagation. VHF signals are modeled using a space-time extended signal framework for a moving Unmanned Aerial Vehicle (UAV), exploiting Doppler effects to create a virtual large-aperture array that captures both one-dimensional angle and Frequency-Of-Arrival (FOA) information. Unlike traditional methods that process each band separately, the OWSF algorithm constructs a unified cost function that fuses the signal and noise subspaces of both HF and VHF data using optimal weighting matrices, balancing the contributions of different signal qualities. Target positions are then estimated by minimizing this cost function via grid search or Newton iteration. The Cramér-Rao Bound (CRB) under Earth-ellipsoid constraints is derived to provide the theoretical performance limit.Results and Discussions Simulations are conducted in a centralized processing scenario, where HF stations and UAV VHF signals are transmitted to a central station for joint processing ( Fig. 2 ). The simulation involves three stationary targets and a collaborative system comprising HF stations and a UAV (Fig. 3 ,Table 2 ,Table 3 ). Performance comparisons demonstrate that the OWSF method consistently outperforms traditional two-step positioning methods and single-system DPD methods (DOA-only or FOA-only) in Root Mean Square Error (RMSE) (Fig. 4 ). When HF SNR is 5 dB lower than VHF SNR, OWSF exhibits superior robustness compared to Subspace Data Fusion (SDF) and Minimum Variance Distortionless Response (MVDR) methods, approaching the CRB at high SNR (Fig. 5 ). The impact of system parameters is further analyzed, showing that increasing the number of sampling points (Fig. 6 ) and array elements (Fig. 7 ) improves accuracy, particularly in low SNR regimes. Regarding spatial resolution, the OWSF algorithm generates sharper spectral peaks for distant targets and successfully resolves closely spaced targets that the SDF-DPD algorithm fails to distinguish (Fig. 8 ,Fig. 9 ).Conclusions The HF/VHF collaborative DPD method effectively integrates multidimensional observational information from ionospheric reflection and Doppler-based propagation. Simulation results demonstrate substantial improvements in localization accuracy, spatial resolution, and robustness, especially under low-SNR conditions or heterogeneous signal quality between bands. The derived CRB provides a solid theoretical benchmark, confirming that the method overcomes the limitations of single-band and two-step approaches. This approach offers a highly effective solution for over-the-horizon passive localization of multiple stationary targets. -
1 基于最优加权子空间拟合的直接定位算法
输入:短波观测站坐标$ \boldsymbol{\tilde{u}}_{}^{\rm d} $,无人机坐标$ \boldsymbol{\tilde{u}}_{}^{\rm f} $,短波信号采样数据$ \boldsymbol{x}_{}^{\rm d} $,超短波信号采样数据$ \boldsymbol{x}_{}^{\rm f} $。 输出:目标坐标估计结果$ {\widehat{\boldsymbol{u}}}_{{{n}_{\rm r}}},{n}_{\rm r}=1,2,\cdots ,{N}_{\rm r} $ 1. for $ n\mathrm{_{\mathrm{\mathrm{d}}}}=1 $to $ N\mathrm{_{\mathrm{d}}} $ do 2. 计算协方差矩阵$ \mathbf{\hat{R}}_{{n}_{\rm d}}^{\rm d}=\dfrac{1}{N}\displaystyle\sum \nolimits_{n=1}^{N}\boldsymbol{x}_{{n}_{\rm d}}^{\rm d}\left(n\right)\boldsymbol{x}_{{n}_{\rm d}}^{\mathrm{d}}\left(n\right)^{\text{H}} $ 3. 特征值分解,得到特征值$ [\lambda_{n_{\mathrm{d},}1}^{\mathrm{d}},\lambda_{n_{\mathrm{d},}2}^{\mathrm{d}},\cdots,\lambda_{n_{\mathrm{d},}M_{\mathrm{d}}}^{\mathrm{d}}] $、信号子空间$ \mathbf{U}_{n_{\mathrm{d}}}^{\mathrm{d},\mathrm{s}} $和噪声子空间$ \mathbf{U}_{n_{\mathrm{d}}}^{\mathrm{d},\mathrm{n}} $ 4. end for 5. for $ n\mathrm{_{\mathrm{f}}}=1 $to $ N_{\mathrm{f}} $ do 6. 建立扩展空时信号模型$ \boldsymbol{\tilde{x}}_{{n}_{\rm f}}^{\rm f} $ 7. 计算协方差矩阵$ \mathbf{\hat{\tilde{R}}}_{{n}_{\rm f}}^{\rm f}=\dfrac{1}{N}\displaystyle\sum \nolimits_{n=1}^{N}\boldsymbol{\tilde{x}}_{{n}_{\rm f}}^{\rm f}\left(n\right)\boldsymbol{\tilde{x}}_{{n}_{\rm f}}^{\mathrm{f}}\left(n\right)^{\text{H}} $ 8. 特征值分解,得到特征值$ [\lambda_{n_{\mathrm{f}},1}^{\mathrm{f}},\lambda_{n\mathrm{_f},2}^{\mathrm{f}},\cdots,\lambda_{n_{\mathrm{f}},LM_{\mathrm{f}}}^{\mathrm{f}}] $、信号子空间$ \mathbf{U}_{n_{\mathrm{f}}}^{\mathrm{f},\mathrm{s}} $和噪声子空间$ \mathbf{U}_{n_{\mathrm{f}}}^{\mathrm{f},\mathrm{n}} $ 9. end for 10.for $ n\mathrm{_r}=1\ \mathrm{to} $ $ N_{\mathrm{r}} $ do 11.根据式(47)和式(48)计算$ g\left(\boldsymbol{u}\right)={g}_{\rm d}\left(\boldsymbol{u}\right)+{g}_{\rm f}\left(\boldsymbol{u}\right) $ 12.搜索极小值得到估计结果$ {\widehat{\boldsymbol{u}}}_{{{n}_{\rm r}}}=\underset{\boldsymbol{u}}{\arg \min }g\left(\boldsymbol{u}\right) $ end for 注:由于$ g\left(\boldsymbol{u}\right) $在每个目标的定位范围内为凹函数,所以在定位过程中可以先通过DOA交汇定位法获得第$ q $个目标的初始估计$ \boldsymbol{\hat{u}}_{{n}_{\rm r}}^{0} $,然后通过网格搜索或Newton迭代法对$ g\left(\boldsymbol{u}\right) $求$ N_{\mathrm{r}} $次极小值,可以避免在对多目标定位时高维度优化带来的计算复杂度。  下载: 导出CSV
下载: 导出CSV
表 1 算法计算复杂度对比
算法 信号协方差矩阵估计 特征值分解 代价函数搜索 OWSF-DPD $ O\left(4M_{\rm d}^{2}N{N}_{\rm d}+4M_{\rm f}^{2}{L}^{2}N{N}_{\rm f}\right) $ $ O\left(M_{\rm d}^{3}{N}_{\rm d}+M_{\rm f}^{3}L{N}_{\rm f}\right) $ $ O\left(\left(\begin{array}{l}16N_{\rm r}^{2}{M}_{\rm d}{N}_{\rm d}+2N_{\rm r}^{}{M}_{\rm d}{N}_{\rm d}\\+8{M}_{\rm d}{N}_{\rm d}+{N}_{\rm d}\\+16N_{\rm r}^{2}{M}_{\rm f}L{N}_{\rm f}\\+2N_{\rm r}^{}{M}_{\rm f}L{N}_{\rm f}\\+8{M}_{\rm f}L{N}_{\rm f}+{N}_{\rm f}\end{array}\right){N}_{\rm r}{N}_{p}\right) $ SDF-DPD $ O\left(4M_{\rm d}^{2}N{N}_{\rm d}+4M_{\rm f}^{2}{L}^{2}N{N}_{\rm f}\right) $ $ O\left(M_{\rm d}^{3}{N}_{\rm d}+M_{\rm f}^{3}L{N}_{\rm f}\right) $ $ O\left(\left(\begin{array}{l}2M_{\rm d}^{2}{N}_{\rm d}-2{M}_{\rm d}{N}_{\rm r}{N}_{\rm d}\\+{M}_{\rm d}{N}_{\rm d}\\+2LM_{\rm f}^{2}{N}_{\rm f}-2L{M}_{\rm f}{N}_{\rm r}{N}_{\rm f}\\+L{M}_{\rm f}{N}_{\rm f}\end{array}\right){N}_{\rm r}{N}_{p}\right) $
下载: 导出CSV
表 2 目标辐射源经纬度坐标
目标 目标-1 目标-2 目标-3 经度 $ 121.50{^{\circ}}\text{E} $ $ 114.30{^{\circ}}\text{E} $ $ 118.30{^{\circ}}\text{E} $ 纬度 $ 37.90{^{\circ}}\text{N} $ $ 38.20{^{\circ}}\text{N} $ $ 36.18{^{\circ}}\text{N} $
下载: 导出CSV
表 3 短波观测站经纬度坐标及电离层虚高
短波观测站 短波-1 短波-2 短波-3 经度 $ 117.12{^{\circ}}\text{E} $ $ 118.45{^{\circ}}\text{E} $ $ 119.98{^{\circ}}\text{E} $ 纬度 $ 36.99{^{\circ}}\text{N} $ $ 34.98{^{\circ}}\text{N} $ $ 35.69{^{\circ}}\text{N} $ 电离层虚高 (km) 340 360 375
下载: 导出CSV
表 4 目标辐射源经纬度坐标
观测单元 目标-1 目标-2 目标-3 经度 121.5°E 114.30°E 121.10°E 纬度 37.90°N 38.20°N 35.69°N
下载: 导出CSV
-
[1] 高星伟, 过静珺, 程鹏飞, 等. 基于时空系统统一的北斗与GPS融合定位[J]. 测绘学报, 2012, 41(5): 743–748,755.GAO Xingwei, GUO Jingjun, CHENG Pengfei, et al. Fusion positioning of BeiDou/GPS based on spatio temporal system unification[J]. Acta Geodaetica et Cartographica Sinica, 2012, 41(5): 743–748,755. [2] 杨东凯, 谭传瑞, 王峰, 等. 基于高度角随机模型的GNSS外辐射源雷达定位算法[J]. 电子与信息学报, 2024, 46(4): 1373–1381. doi: 10.11999/JEIT230462.YANG Dongkai, TAN Chuanrui, WANG Feng, et al. Elevation-dependent stochastic localization algorithm for GNSS-based passive radar[J]. Journal of Electronics & Information Technology, 2024, 46(4): 1373–1381. doi: 10.11999/JEIT230462. [3] 陈光辉, 曾孝平, 焦爽. 基于阵列划分的近场DOA估计算法[J]. 电子学报, 2022, 50(9): 2110–2118. doi: 10.12263/DZXB.20201364.CHEN Guanghui, ZENG Xiaoping, and JIAO Shuang. Near-field DOA estimation algorithm using array partition[J]. Acta Electronica Sinica, 2022, 50(9): 2110–2118. doi: 10.12263/DZXB.20201364. [4] 孟天次, 张贞凯, 林云航. 一种改进两步加权最小二乘的TDOA定位算法[J]. 电讯技术, 2022, 62(6): 782–787. doi: 10.3969/j.issn.1001-893x.2022.06.014.MENG Tianci, ZHANG Zhenkai, and LIN Yunhang. An improved two-step weighted least squares TDOA location algorithm[J]. Telecommunication Engineering, 2022, 62(6): 782–787. doi: 10.3969/j.issn.1001-893x.2022.06.014. [5] 王鼎, 尹洁昕, 郑娜娥, 等. 信号传播速度未知下基于运动单站到达频率的定位新方法[J]. 电子学报, 2022, 50(5): 1181–1191. doi: 10.12263/DZXB.20210852.WANG Ding, YIN Jiexin, ZHENG Nae, et al. A FOA-based localization method for moving single station under unknown signal propagation speed[J]. Acta Electronica Sinica, 2022, 50(5): 1181–1191. doi: 10.12263/DZXB.20210852. [6] 左燕, 陈王蓉, 彭冬亮. 发射站未知下多基地外辐射源运动目标两阶段约束加权最小二乘定位算法[J]. 电子与信息学报, 2025, 47(6): 1772–1781. doi: 10.11999/JEIT240664.ZUO Yan, CHEN Wangrong, and PENG Dongliang. Two-stage constrained weighted least squares method for multistatic passive localization of a moving object under unknown transmitter position and velocity[J]. Journal of Electronics & Information Technology, 2025, 47(6): 1772–1781. doi: 10.11999/JEIT240664. [7] 王鼎, 尹洁昕, 朱中梁. 针对超视距短波辐射源的测角与测时差协同定位方法[J]. 中国科学: 信息科学, 2022, 52(11): 1942–1973. doi: 10.1360/SSI-2021-0331.WANG Ding, YIN Jiexin, and ZHU Zhongliang. Novel cooperative localization method of over-the-horizon shortwave emitters based on direction-of-arrival and time-difference-of-arrival measurements[J]. SCIENTIA SINICA Informationis, 2022, 52(11): 1942–1973. doi: 10.1360/SSI-2021-0331. [8] WEISS A J and AMAR A. Direct position determination of multiple radio signals[J]. EURASIP Journal on Advances in Signal Processing, 2005, 2005(1): 653549. doi: 10.1155/ASP.2005.37. [9] TANG Wenqi, WAN Qqun, QU Wenzhong, et al. Multipath measurements for HF signals with polarimetric array and band-limited Gaussian noise waveform[J]. IEEE Sensors Journal, 2025, 25(3): 5139–5151. doi: 10.1109/JSEN.2024.3516940. [10] CHAI Heng, YIN Xinjian, HU Hao, et al. Direct position determination of wideband source over multipath environment: Combining Taylor expansion and subspace data fusion in the cross-spectrum domain[J]. Sensors, 2025, 25(16). doi: 10.3390/s25164967. [11] VANKAYALAPATI N, KAY S, and DING Quan. TDOA based direct positioning maximum likelihood estimator and the Cramer-Rao bound[J]. IEEE Transactions on Aerospace and Electronic Systems, 2014, 50(3): 1616–1635. doi: 10.1109/TAES.2013.110499. [12] DEMISSIE B, OISPUU M, and RUTHOTTO E. Localization of multiple sources with a moving array using subspace data fusion[C]. 2008 11th International Conference on Information Fusion, Cologne, Germany, 2008: 1–7. [13] YANG Gaoyuan, YIN Jiexin, WANG Dding, et al. Direct position determination of multiple over-the-horizon sources based on weighted SDF using combination of HF and UHF signals[J]. IEEE Sensors Journal, 2025, 25(14): 27686–27700. doi: 10.1109/JSEN.2025.3574509. [14] GAO Yuan, ZHANG Xiaofei, YOU Mingyi, et al. Direct self-position determination exploiting multiple noncircular emitters: A reduced dimensional weighted propagator method[J]. IEEE Sensors Journal, 2024, 24(17): 27836–27846. doi: 10.1109/JSEN.2024.3430293. [15] ZHENG Qunzhen. Maximum likelihood estimation for nonlinear problem processing[J]. International Journal of Dynamics and Control, 2025, 13(10): 334. doi: 10.1007/s40435-025-01845-w. [16] LI Pan, LI Jianfeng, ZHANG Xiaofei, et al. Gridless maximum likelihood one-bit direct position determination[J]. IEEE Signal Processing Letters, 2024, 31: 3099–3103. doi: 10.1109/LSP.2024.3491020. [17] LI Jiaqi, ZHANG Xiaofei, and JIANG Kang. The phase fractional lower-order moment based DPD algorithm of non-circular sources for nested array under impulsive noise[J]. Wireless Personal Communications, 2024, 139(1): 183–208. doi: 10.1007/s11277-024-11597-z. [18] 于淇, 尹洁昕, 刘正武, 等. 针对圆和非圆信号混合入射的多特征融合网络鲁棒测向算法[J]. 电子与信息学报, 2025. doi: 10.11999/JEIT250884.YU Qi, YIN Jiexin, LIU Zhengwu, et al. A neural network-based robust direction finding algorithm for mixed circular and non-circular signals under array imperfections[J]. Journal of Electronics & Information Technology, 2025. doi: 10.11999/JEIT250884. [19] 杜剑平, 余婉婷, 刘广怡, 等. 基于周期宽带参考信号的直接定位方法[J]. 信号处理, 2018, 34(12): 1415–1429. doi: 10.16798/j.issn.1003-0530.2018.12.003.DU Jianping, YU Wanting, LIU Guangyi, et al. Direct position determination assisted by the periodic wideband reference signal[J]. Journal of Signal Processing, 2018, 34(12): 1415–1429. doi: 10.16798/j.issn.1003-0530.2018.12.003. [20] 尹洁昕, 王鼎, 杨欣, 等. 模型误差影响下基于CNN+BiLSTM神经网络的非圆信号目标直接跟踪算法[J]. 电子学报, 2024, 52(4): 1315–1329. doi: 10.12263/DZXB.20230525.YIN Jiexin, WANG Ding, YANG Xin, et al. Direct tracking for a non-circular source based on CNN+BiLSTM neural network in the presence of modeling errors[J]. Acta Electronica Sinica, 2024, 52(4): 1315–1329. doi: 10.12263/DZXB.20230525. [21] 余婉婷, 于宏毅, 杜剑平, 等. 辐射源信号波形已知的超视距目标直接定位方法[J]. 电子学报, 2019, 47(11): 2368–2377. doi: 10.3969/j.issn.0372-2112.2019.11.019.YU Wanting, YU Hongyi, DU Jianping, et al. A direct position determination method for over-the-horizon target on known radiation source waveforms[J]. Acta Electronica Sinica, 2019, 47(11): 2368–2377. doi: 10.3969/j.issn.0372-2112.2019.11.019. [22] 邓丽娟. 基于多普勒频移的运动多站无源定位技术研究[D]. [博士论文], 电子科技大学, 2019.DENG Lijuan. Research on passive localization based on Doppler frequency shift of multiple moving receivers[D]. [Ph. D. dissertation], University of Electronic Science and Technology of China, 2019. [23] 王鼎, 尹洁昕, 吴志东, 等. 一种基于多普勒频率的恒模信号直接定位方法[J]. 航空学报, 2017, 38(9): 321084. doi: 10.7527/S1000-6893.2017.321084.WANG Ding, YIN Jiexin, WU Zhidong, et al. Direct localization method for constant modulus source based on Doppler frequency shifts[J]. Acta Aeronautica et Astronautica Sinica, 2017, 38(9): 321084. doi: 10.7527/S1000-6893.2017.321084. [24] YIN Jiexin, WANG Ding, WU Ying, et al. Single-step localization using multiple moving arrays in the presence of observer location errors[J]. Signal Processing, 2018, 152: 392–410. doi: 10.1016/j.sigpro.2018.06.009. [25] WANG Zhaobo, GUO Hui, MIAO Yingjie, et al. Direct position determination of multiple sources using a moving virtual interpolation array[J]. Digital Signal Processing, 2025, 159: 104973. doi: 10.1016/j.dsp.2024.104973. [26] STOICA P and NEHORAI A. MUSIC, maximum likelihood, and Cramer-Rao bound[J]. IEEE Transactions on Acoustics, Speech, and Signal Processing, 1989, 37(5): 720–741. doi: 10.1109/29.17564. [27] 王永良. 空间谱估计理论与算法[M]. 北京: 清华大学出版社, 2004: 152–158.WANG Yongliang. Theory and Algorithm of Space Spectrum Estimation[M]. Beijing: Tsinghua University Press, 2004: 152–158. [28] AMAR A and WEISS A J. Localization of narrowband radio emitters based on Doppler frequency shifts[J]. IEEE Transactions on Signal Processing, 2008, 56(11): 5500–5508. doi: 10.1109/TSP.2008.929655. [29] LI Jianfeng, LI Pan, LI Ping, et al. Self-position awareness based on cascade direct localization over multiple source data[J]. IEEE Transactions on Intelligent Transportation Systems, 2024, 25(1): 796–804. doi: 10.1109/TITS.2022.3170465. [30] LIU Lutao, FAN Xueye, GUO Muran, et al. Joint estimation of location and polarization in direct position determination using a moving single station[J]. Circuits, Systems, and Signal Processing, 2025, 44(3): 1793–1816. doi: 10.1007/s00034-024-02884-y. [31] TZAFRI L and WEISS A J. High-resolution direct position determination using MVDR[J]. IEEE Transactions on Wireless Communications, 2016, 15(9): 6449–6461. doi: 10.1109/TWC.2016.2585116. [32] WU Guizhou, ZHANG Min, and GUO Fucheng. High-resolution direct position determination based on eigenspace using a single moving ULA[J]. Signal, Image and Video Processing, 2019, 13(5): 887–894. doi: 10.1007/s11760-019-01425-4. [33] YIN Jiexin, WU Ying, and WANG Ding. Direct position determination of multiple noncircular sources with a moving array[J]. Circuits, Systems, and Signal Processing, 2017, 36(10): 4050–4076. doi: 10.1007/s00034-017-0499-4. -




图(9) / 表(5)
计量
- 文章访问数: 197
- HTML全文浏览量: 85
- PDF下载量: 16
- 被引次数: 0
 下载:
下载:
