

Box Particle Filter δ-GLMB Algorithm for Multiple Maneuvering Group Targets Tracking
-
摘要: 针对非线性量测条件下的多机动群目标跟踪问题,提出了一种基于交互式多模型的伽马箱粒子δ-广义标签多伯努利(Interactive Multiple Model Gamma Box Particle δ- Generalized Labeled Multi-Bernoulli, IMM-GBP-δ-GLMB)算法。基于箱粒子滤波框架和区间分析理论,以区间覆盖代替多点概率近似,实现对量测不确定性和扩展状态的高效表示;通过改进似然函数和引入交互式多模型分别增强对群目标扩展外形和质心运动状态的跟踪能力,提升了算法的跟踪精度。最后,结合随机有限集理论推导了算法的δ-GLMB形式。仿真结果表明,所提算法以8.5%左右的跟踪精度代价,获得了3.8倍的时效性提升;对3个群目标和2个群目标的平均跟踪时间增长速度为原算法的96%,对群目标数量增加具有较好的时间鲁棒性,所提算法具有较好的实用价值。Abstract:
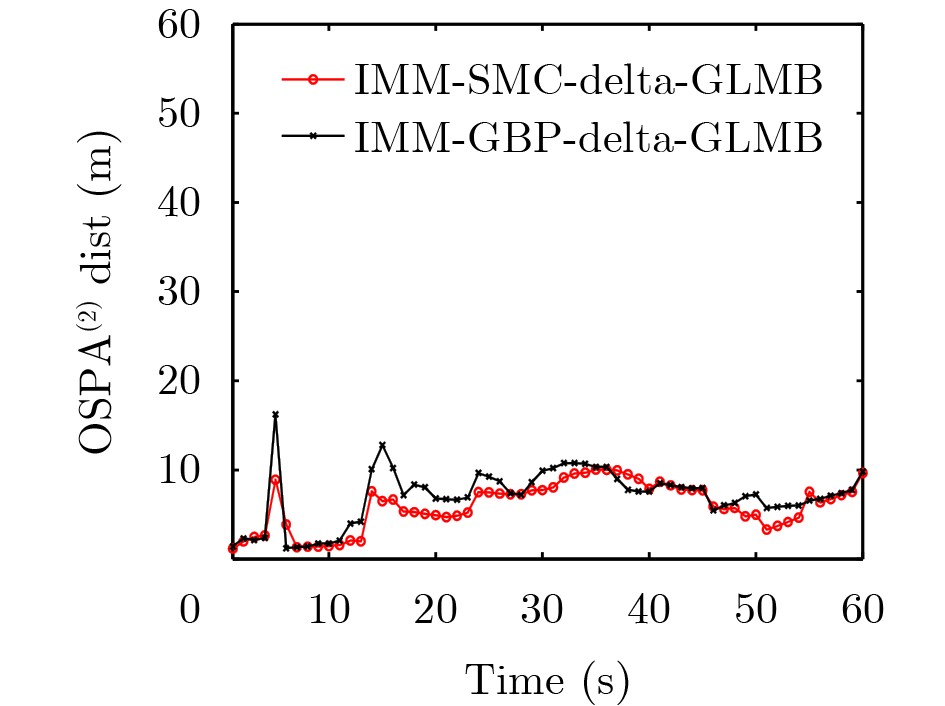
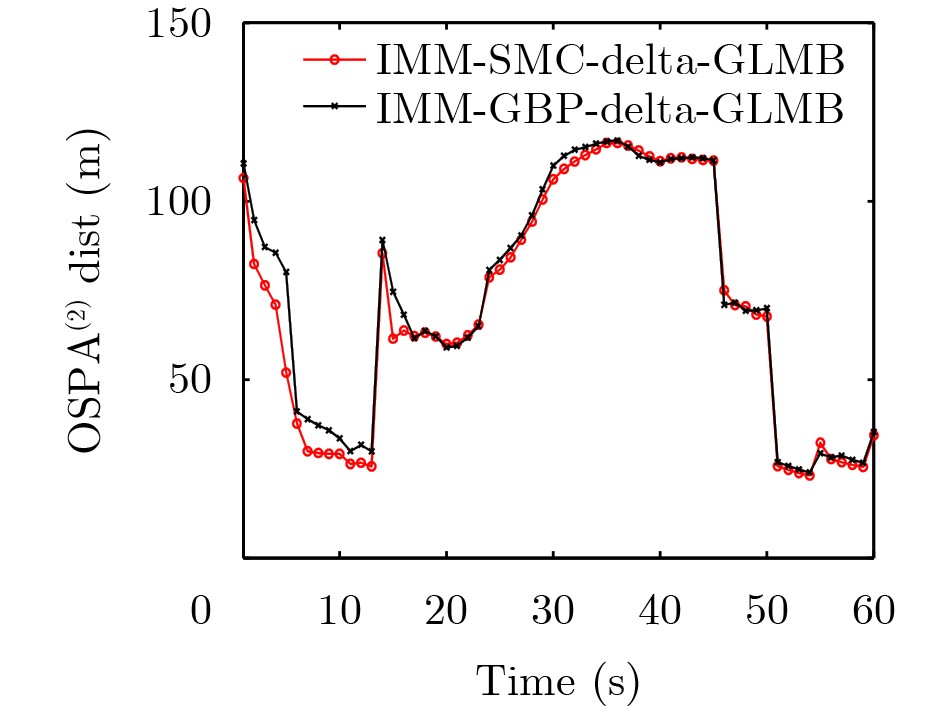
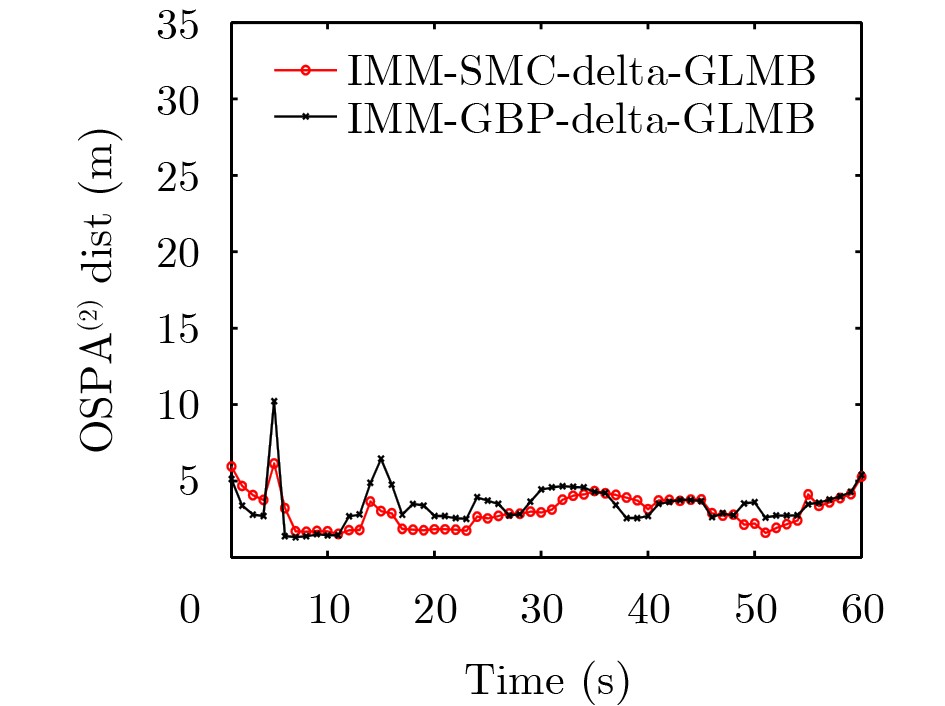
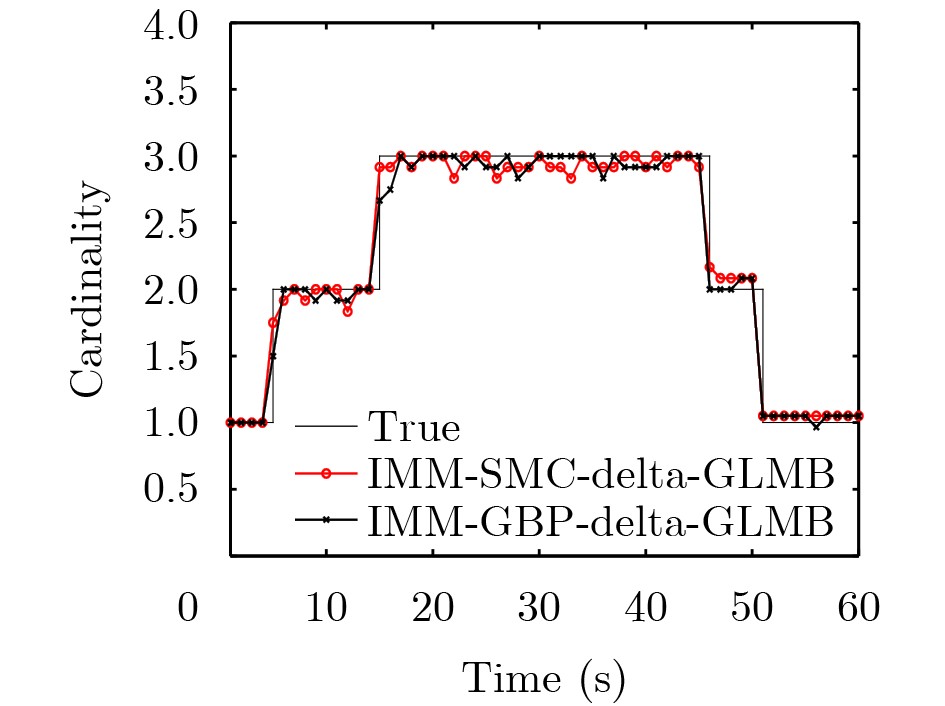
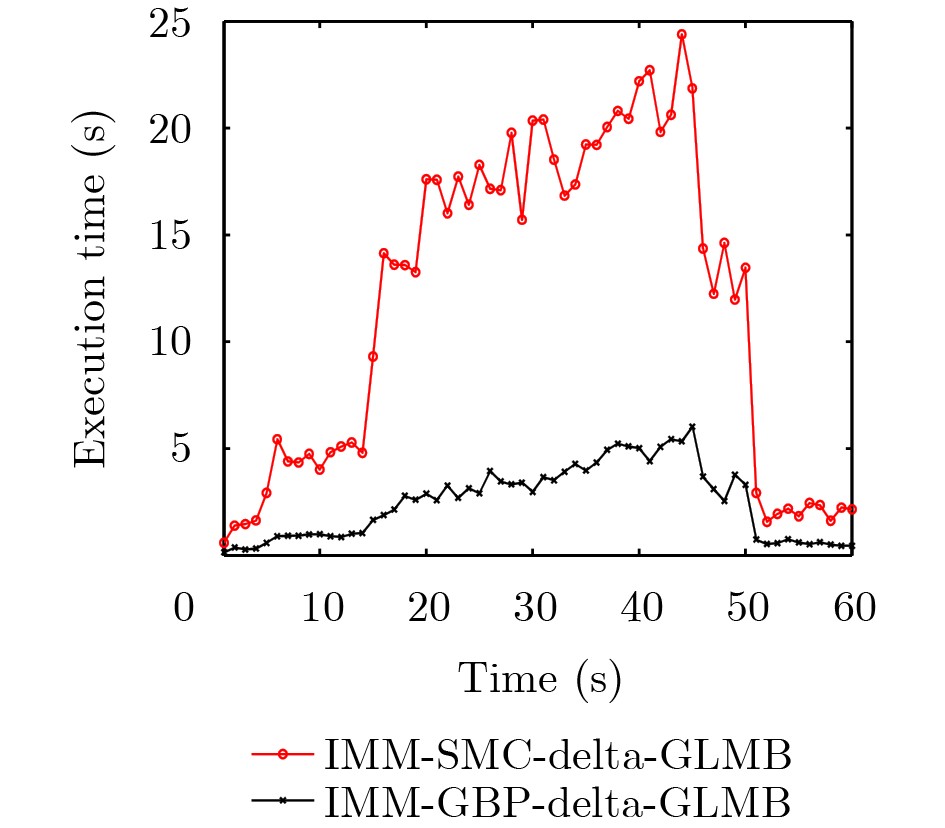
Objective Targets that move in a coordinated manner or have similar motion patterns and exhibit certain collective motion characteristics are often referred to as group targets. Dense group targets, characterized by a large number of closely spaced individuals, suffer from poor measurement resolvability, severe measurement overlap, and frequent target disappearance and reappearance, making it difficult to establish stable tracks for individual targets within the group. Therefore, such groups are typically treated as a whole to jointly estimate the kinematic state of their centroid and their extended shape. To enhance the tracking accuracy and computational efficiency for multiple maneuvering group targets under nonlinear measurements, an interacting multiple model group box-particle δ-generalized labeled multi-Bernoulli (IMM-GBP-δ-GLMB) algorithm is proposed. The tracking efficiency under nonlinear measurements is improved through the box particle filter (BPF) method. By improving the likelihood function of the GPB algorithm and introducing the IMM algorithm, the tracking capability for the extended shape and the centroid kinematic state of group targets is respectively enhanced, and the tracking accuracy of the algorithm is improved. Finally, by integrating with the GLMB filter, the tracking of multiple maneuvering group targets with unknown number is achieved. Methods To address the limitation of existing algorithms, which primarily capture the area-based overlap relationship between the predicted extended state of group targets and the measurement distribution while neglecting shape similarity, the likelihood function of the BPF is modified. The improved algorithm achieves higher prediction accuracy by incorporating geometric parameters — such as the semi-major axis, semi-minor axis, and inclination angle — into the likelihood function, thereby enhancing the modeling of similarity between the predicted extended state and the measurement distribution. This is particularly beneficial in scenarios involving maneuvering group targets, where the inclination angle of the extended shape changes frequently as the group maneuvers. Based on modeling group motion with the IMM, a model index is appended to the kinematic state of each box particle’s centroid. By jointly estimating the model index and the centroid kinematic state in each iteration of the algorithm, we realize tracking of the mode transitions of individual box particles, which further improves tracking accuracy. Finally, we embed the improved IMM-GBP filter into the labeled random finite set framework and derive the IMM-GBP-δ-GLMB algorithm, which enables effective tracking of multiple maneuvering group targets. Results and Discussions Simulation experiments are conducted to compare the proposed algorithm (IMM-GBP-δ-GLMB) with the IMM sequential Monte Carlo δ-GLMB (IMM-SMC-δ-GLMB) filter. While comparable estimation accuracy in terms of centroid state, extended state, measurement rate, and target number for multiple group targets is maintained, emphasis is placed on computational efficiency. In the given simulation scenario, the proposed algorithm achieves a 3.8-fold improvement in timeliness, at the cost of a loss of about 8.5% in tracking accuracy. For the scenarios with two and three group targets, the average tracking time growth rate of the proposed algorithm is 96% of that of the IMM-SMC-δ-GLMB filter, showing good temporal robustness to increasing group target numbers. Hence, the proposed algorithm has strong practical value. Conclusions This paper addresses the tracking problem of multiple maneuvering group targets under nonlinear measurement conditions by proposing the IMM-GBP-δ-GLMB algorithm. The main contributions are as follows: (1) By improving the likelihood function of the BPF, we enhance the algorithm's ability to measure the similarity between the target's extended shape and the measurement distribution, which in turn improves the tracking accuracy of the group target state. (2) By labeling the motion model for each box particle, we track the transition of the target's motion state during the filtering process. This allows the filter to achieve higher tracking accuracy with fewer box particles, thereby improving computational efficiency. (3) Integrating the IMM-GBP method into the δ-GLMB framework yields the final IMM-GBP-δ-GLMB filter and realizes effective tracking of multiple maneuvering group targets. -
表 1 群目标预测概率密度的主要计算流程
输入:$ \left\{{\varPi }\left({r}_{+}|r\right),{p}^{\left(\varsigma \right)}\left(\xi ,r,\ell\right),{p}_{\text{S}}\left(\cdot ,r,\ell\right),\left[f\right]\left({\xi }_{+}|\cdot ,{r}_{+},\ell\right)\right\} $ 1. 输入交互 ①求解模型的预测概率密度 $ p_{\text{S}}^{(\varsigma )}\left({r}_{+},\ell\right)=\displaystyle\sum \limits_{r\in \mathcal{R}}{\varPi }\left({r}_{+}|r\right){p}^{\left(\varsigma \right)}\left(r,\ell\right) $ (56) ②模型的条件概率密度 $ p_{\text{S}}^{(\varsigma )}\left({r}_{+}|r,\ell\right)={\varPi }\left({r}_{+}|r\right){p}^{\left(\varsigma \right)}\left(r,\ell\right)/p_{\text{S}}^{(\varsigma )}\left({r}_{+},\ell\right) $ (57) ③混合估计 $ p_{}^{(\varsigma )}\left({\xi }_{0}|{r}_{+},\ell\right)=\displaystyle\sum \limits_{r\in \mathcal{R}}{p}^{\left(\varsigma \right)}\left(\xi |r,\ell\right)p_{\text{S}}^{(\varsigma )}\left({r}_{+}|r,\ell\right) $ (58) 2. 滤波器预测 $ \begin{aligned}p_{\text{S}}^{(\varsigma )}\left({\xi }_{+},{r}_{+},{\ell}_{+}\right)&=\frac{\left\langle {p}_{\text{S}}\left(\cdot ,r,\ell\right)\left[f\right]\left({\xi }_{+}|\cdot ,{r}_{+},\ell\right),p_{}^{(\varsigma )}\left(\cdot |{r}_{+},\ell\right)\right\rangle }{\left\langle {p}_{\text{S}}\left(\cdot ,r,\ell\right),p_{}^{(\varsigma )}\left(\cdot |{r}_{+},\ell\right)\right\rangle }\\&={\delta }_{\ell}\left({\ell}_{+}\right)p_{\text{S}}^{(\varsigma )}\left({r}_{+},{\ell}_{+}\right)p_{\text{S}}^{(\varsigma )}\left({\xi }_{+}|{r}_{+},{\ell}_{+}\right)\\&\approx{\delta }_{\ell}\left({\ell}_{+}\right)p_{\text{S}}^{(\varsigma )}\left({r}_{+},{\ell}_{+}\right)\displaystyle\sum \limits_{i=1}^{N\left({r}_{+},{\ell}_{+}\right)}\omega _{\text{S}}^{\left({r}_{+},{\ell}_{+},i\right)}{U}_{\left[\left.\xi _{\text{S} ,+}^{\left({\ell}_{+},i\right)}\right| {r}_{+}\right]}\left(\xi |r\right)\end{aligned} $ (59) 输出:联合新生目标的概率密度$ p_{\text{B}}^{(\varsigma )}\left({\xi }_{+},{r}_{+},{\ell}_{+}\right) $,得到$ p_{+}^{(\varsigma )}\left({\xi }_{+},{r}_{+},{\ell}_{+}\right) $。  下载: 导出CSV
下载: 导出CSV
-
[1] XIONG Chao, HU Moufa, LU Huanzhang, et al. Distributed multi-sensor fusion for multi-group/extended target tracking with different limited fields of view[J]. Applied Sciences, 2024, 14(21): 9627. doi: 10.3390/app14219627. [2] 甘林海, 王刚, 刘进忙, 等. 群目标跟踪技术综述[J]. 自动化学报, 2020, 46(3): 411–426. doi: 10.16383/j.aas.c180052.GAN Linhai, WANG Gang, LIU Jinmang, et al. An overview of group target tracking[J]. Acta Automatica Sinica, 2020, 46(3): 411–426. doi: 10.16383/j.aas.c180052. [3] CHEN Jian, HE Jiacheng, WANG Gang, et al. A maritime multitarget tracking method with non-Gaussian measurement noises based on joint probabilistic data association[J]. IEEE Transactions on Instrumentation and Measurement, 2025, 74: 9002812. doi: 10.1109/TIM.2025.3551023. [4] GUO Wen, JIN Yuelong, SHAN Bin, et al. Multi-cue multi-hypothesis tracking with re-identification for multi-object tracking[J]. Multimedia Systems, 2022, 28(3): 925–937. doi: 10.1007/s00530-022-00895-w. [5] 薛昱, 冯西安. 一种纯方位多目标跟踪的联合多高斯混合概率假设密度滤波器[J]. 电子与信息学报, 2024, 46(11): 4295–4304. doi: 10.11999/JEIT240201.XUE Yu and FENG Xi’an. Joint multi-Gaussian mixture probability hypothesis density filter for bearings-only multi-target tracking[J]. Journal of Electronics & Information Technology, 2024, 46(11): 4295–4304. doi: 10.11999/JEIT240201. [6] ZHAO Jun, GUI Renzhou, and DONG Xudong. Generalized labeled multi-Bernoulli filter-based passive localization and tracking of radiation sources carried by unmanned aerial vehicles[J]. Drones, 2024, 8(3): 96. doi: 10.3390/drones8030096. [7] 王宁, 段睿, 周笑仪. 量测不确定性条件下的箱粒子滤波目标跟踪方法[J]. 电子与信息学报, 2024, 46(9): 3654–3661. doi: 10.11999/JEIT231439.WANG Ning, DUAN Rui, and ZHOU Xiaoyi. A target tracking method based on box-particle filter under measurement uncertainty[J]. Journal of Electronics & Information Technology, 2024, 46(9): 3654–3661. doi: 10.11999/JEIT231439. [8] ZOU Zhibin, SONG Liping, and SONG Zhilong. Labeled box-particle PHD filter for multi-target tracking[C]. 2017 3rd IEEE International Conference on Computer and Communications (ICCC), Chengdu, China, 2017: 1725–1730. doi: 10.1109/CompComm.2017.8322835. [9] 张永权, 李志彬, 张文博, 等. 多源传感器箱粒子LMB滤波算法[J]. 西安电子科技大学学报, 2024, 51(4): 51–66. doi: 10.19665/j.issn1001-2400.20240104.ZHANG Yongquan, LI Zhibin, ZHANG Wenbo, et al. Multi-source sensor box particle LMB filtering algorithm[J]. Journal of Xidian University, 2024, 51(4): 51–66. doi: 10.19665/j.issn1001-2400.20240104. [10] DE FREITAS A, MIHAYLOVA L, GNING A, et al. A box particle filter method for tracking multiple extended objects[J]. IEEE Transactions on Aerospace and Electronic Systems, 2019, 55(4): 1640–1655. doi: 10.1109/TAES.2018.2874147. [11] LI Miao, LIN Zaiping, AN Wei, et al. Box-particle labeled multi-Bernoulli filter for multiple extended target tracking[J]. Radioengineering, 2016, 25(3): 527–535. doi: 10.13164/re.2016.0527. [12] JIAO Qinqin and YANG Xiaojun. Distributed variational measurement update for extended target tracking with random matrix[J]. IEEE Transactions on Aerospace and Electronic Systems, 2024, 60(4): 3792–3806. doi: 10.1109/TAES.2024.3368405. [13] ZHANG Cuihua and YANG Guanghong. Event-based remote state estimation for nonlinear systems: A box particle filtering method[J]. IEEE Transactions on Cybernetics, 2024, 54(4): 2472–2482. doi: 10.1109/TCYB.2022.3218330. [14] ZHANG Yongquan, JI Hongbing, and HU Qi. A box-particle implementation of standard PHD filter for extended target tracking[J]. Information Fusion, 2017, 34: 55–69. doi: 10.1016/j.inffus.2016.06.007. [15] XIE Xingxiang, ZHAO Xiongwei, SONG Zhumei, et al. Posterior Cramér–Rao lower bounds for extended target tracking with PMBM conjugate recursion[J]. Electronics Letters, 2024, 60(18): e70041. doi: 10.1049/ell2.70041. [16] ZHANG Yongquan, JI Hongbing, GAO Xinbo, et al. An ellipse extended target CBMeMBer filter using gamma and box-particle implementation[J]. Signal Processing, 2018, 149: 88–102. doi: 10.1016/j.sigpro.2018.03.002. [17] VO B T and VO B N. Labeled random finite sets and multi-object conjugate priors[J]. IEEE Transactions on Signal Processing, 2013, 61(13): 3460–3475. doi: 10.1109/TSP.2013.2259822. [18] BEARD M, VO B T, and VO B N. Bayesian multi-target tracking with merged measurements using labelled random finite sets[J]. IEEE Transactions on Signal Processing, 2015, 63(6): 1433–1447. doi: 10.1109/TSP.2015.2393843. [19] ZHANG Yongquan, JI Hongbing, and HU Qi. A fast ellipse extended target PHD filter using box-particle implementation[J]. Mechanical Systems and Signal Processing, 2018, 99: 57–72. doi: 10.1016/j.ymssp.2017.05.044. -



图(7) / 表(1)
计量
- 文章访问数: 11
- HTML全文浏览量: 5
- PDF下载量: 0
- 被引次数: 0
 下载:
下载:
