

Multi-projection plane InISAR 3D reconstruction method for complex moving ship targets
-
摘要: 干涉逆合成孔径雷达(InISAR)是一种非合作目标三维重建技术。然而,在对具有复杂运动特性的舰船目标成像时,复杂三维旋转运动会导致目标多普勒频率变化不稳定,直接影响目标三维重建质量,同时,ISAR成像不可避免地存在目标叠掩和遮挡问题,致使单一投影平面的InISAR技术无法实现目标三维信息完全重建。针对上述问题,该文提出了一种复杂运动舰船目标多投影平面InISAR三维重建方法。首先,在分析高海情下长相干积累时间内舰船目标多维复杂运动特性的基础上,结合主成分分析算法选择多个不同成像投影平面的成像时间段,获取多个不同投影平面的高质量舰船目标逆合成孔径雷达(ISAR)图像及其三维重建结果。其次,结合加权随机采样一致性与分层迭代最近点方法,高精度提取和匹配多投影平面三维图像的同名特征点,实现多投影平面InISAR三维图像的高效高精度配准与融合。舰船点目标散射模型和电磁仿真模型的实验结果表明,与单一投影平面下的目标三维重建结果相比,该文所提方法获得的InISAR三维重建质量得到了显著提升。
-
关键词:
- ISAR成像 /
- InISAR重建 /
- 舰船目标 /
- 多投影平面 /
- RANSAC-ICP
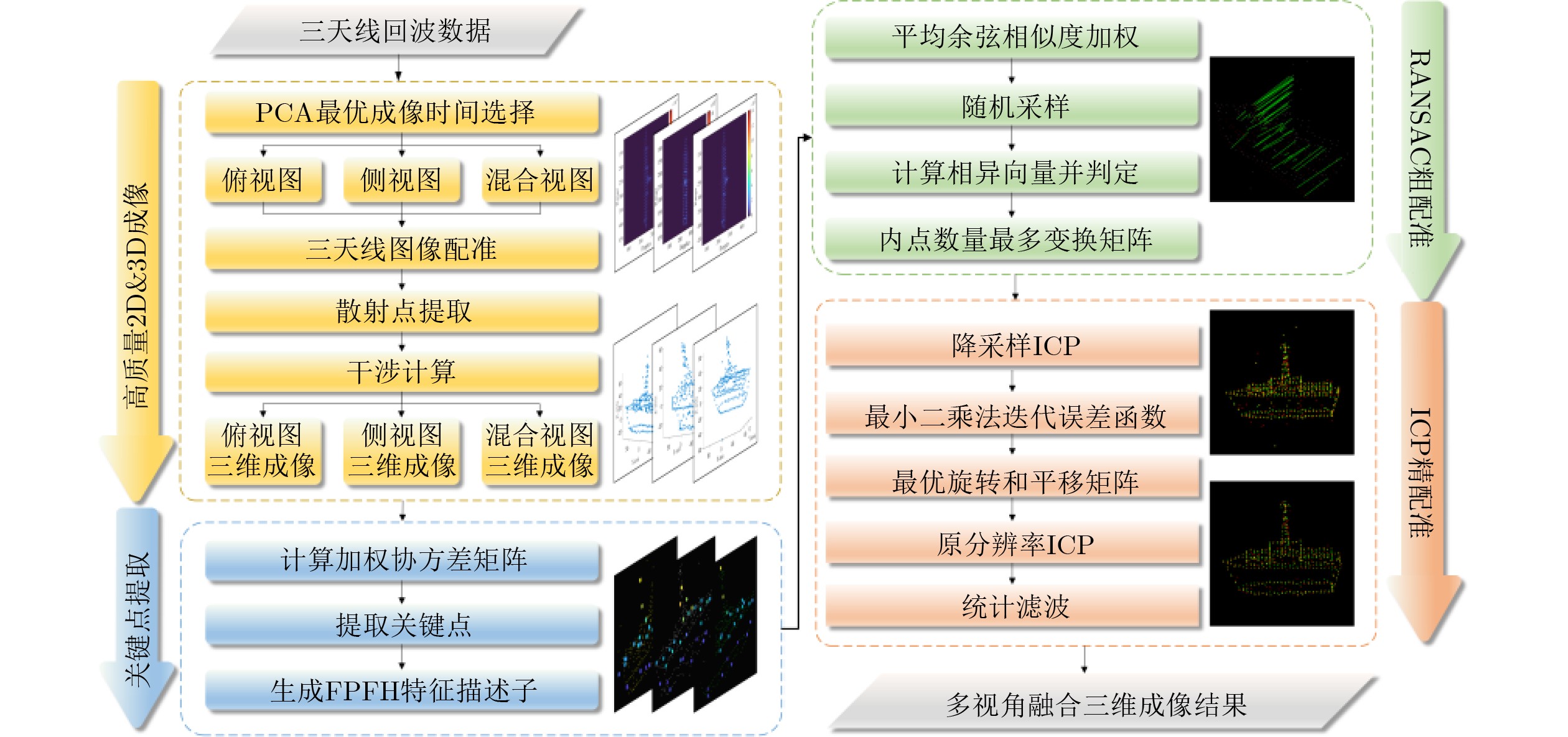
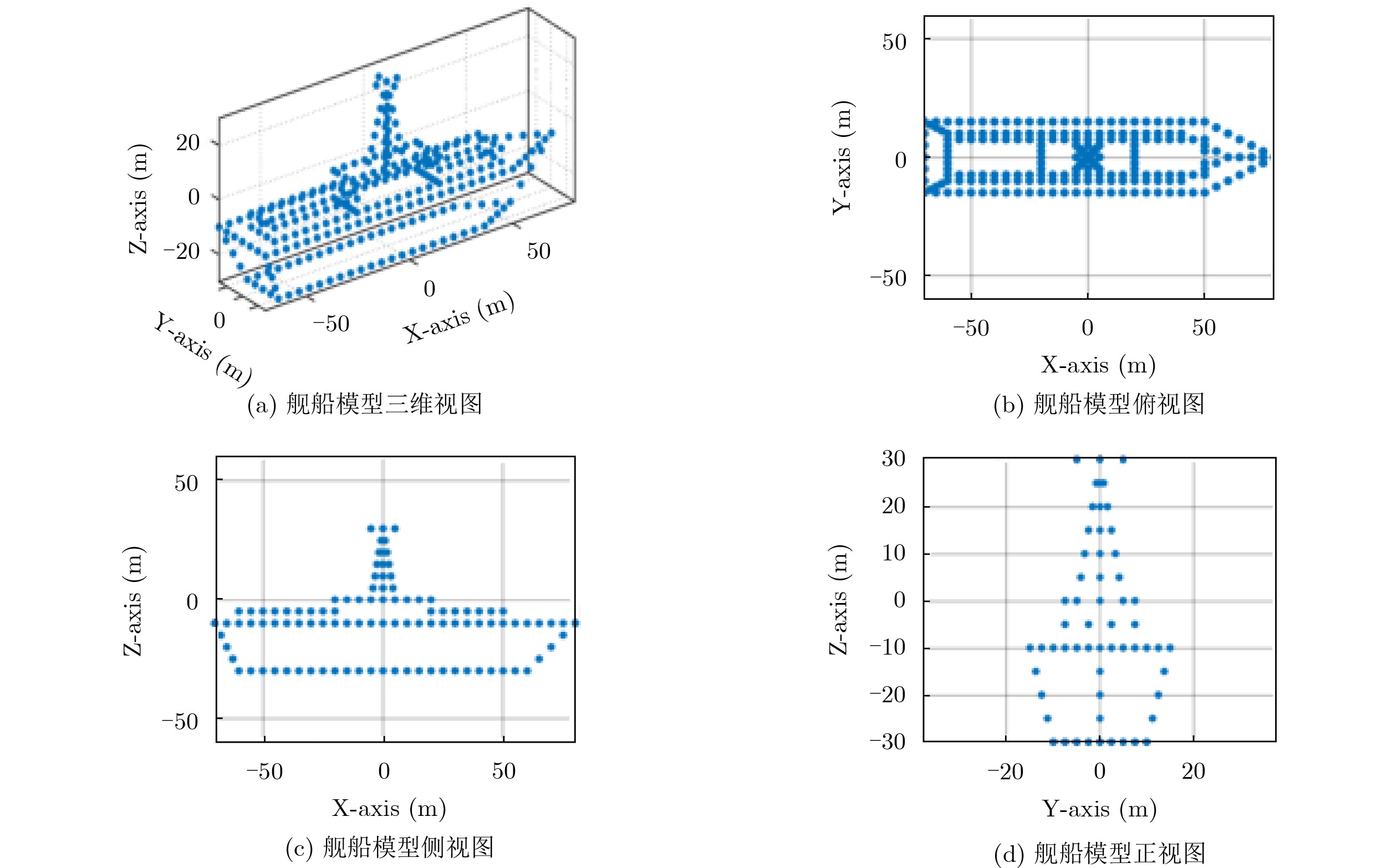
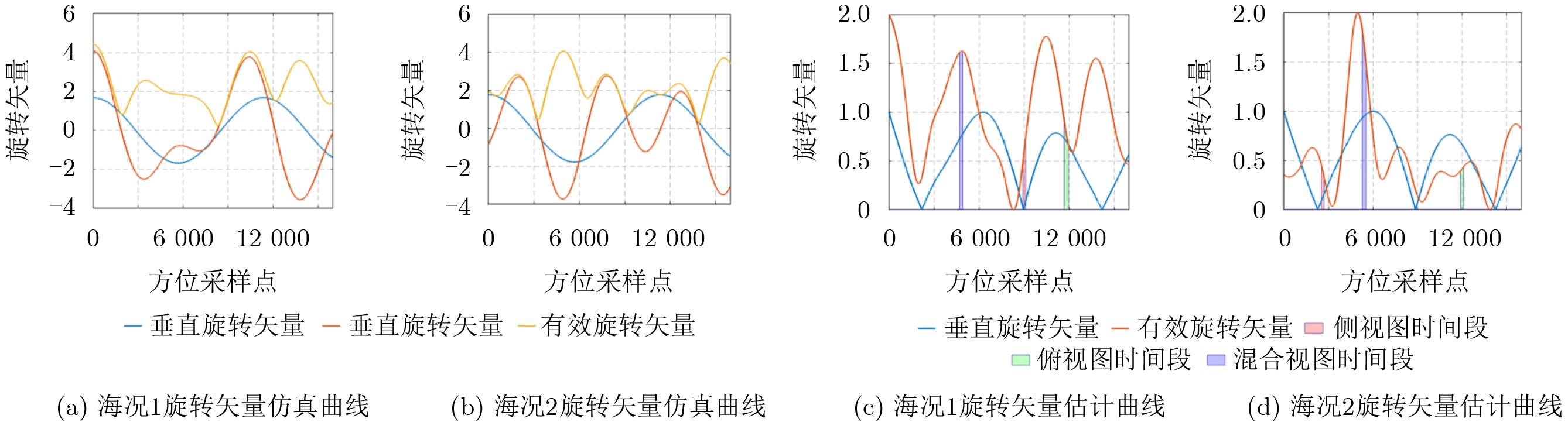
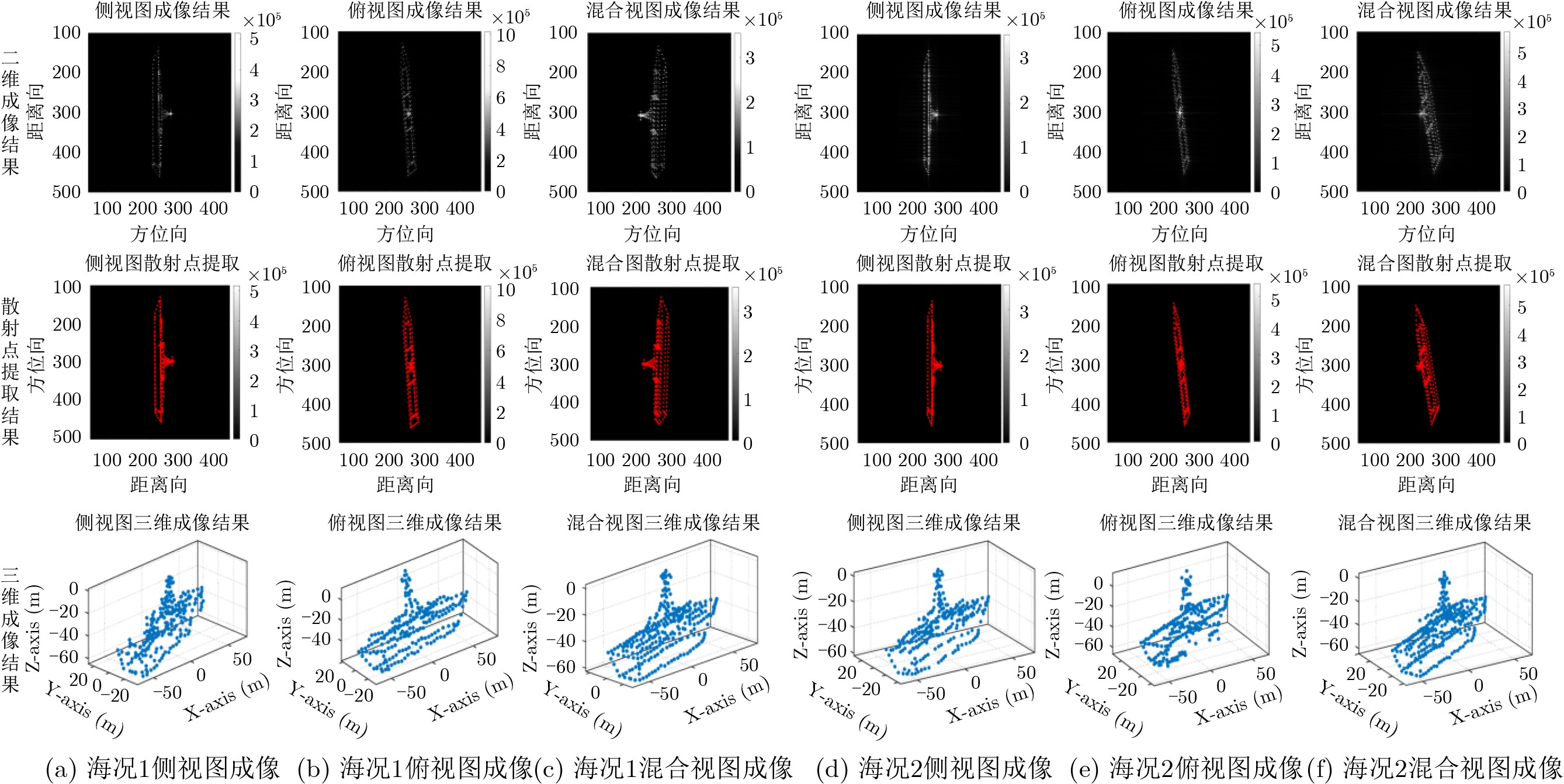
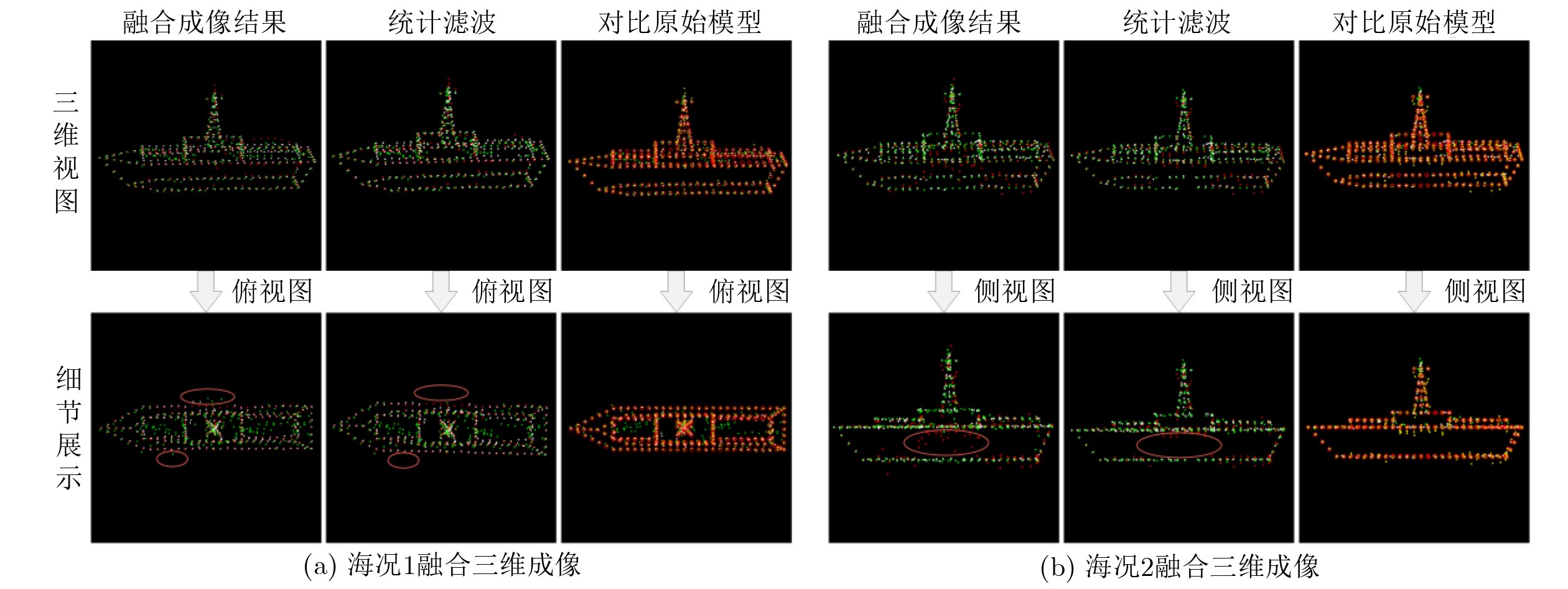
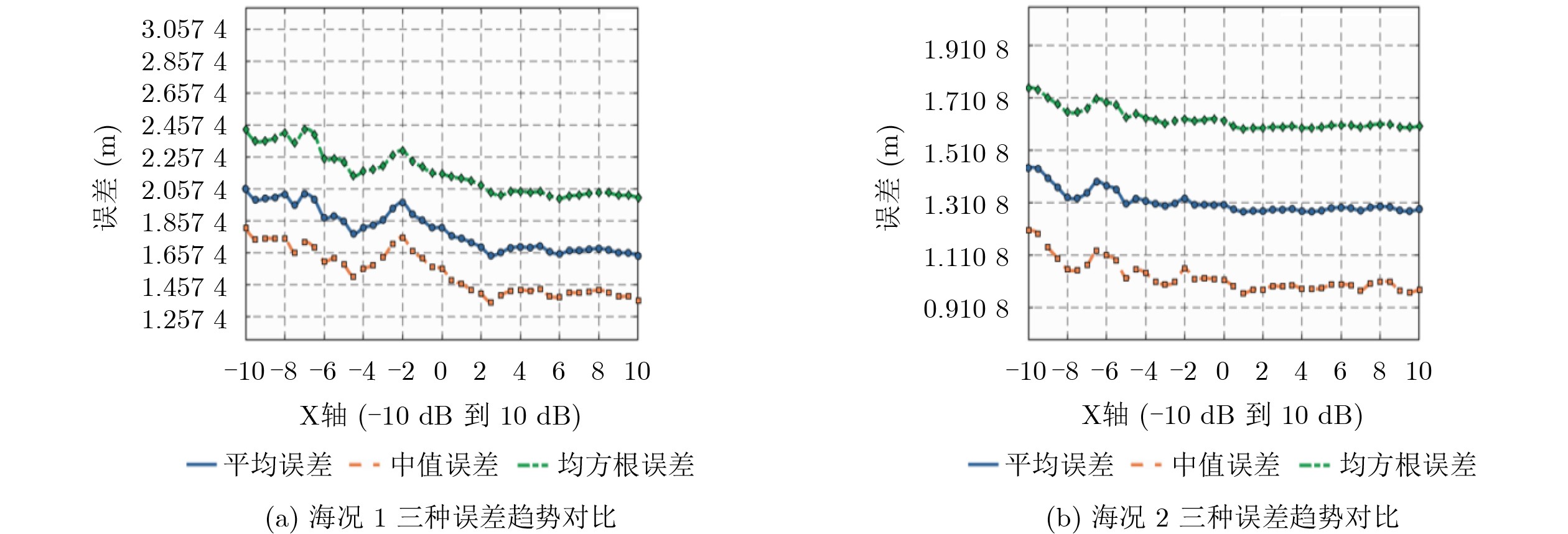
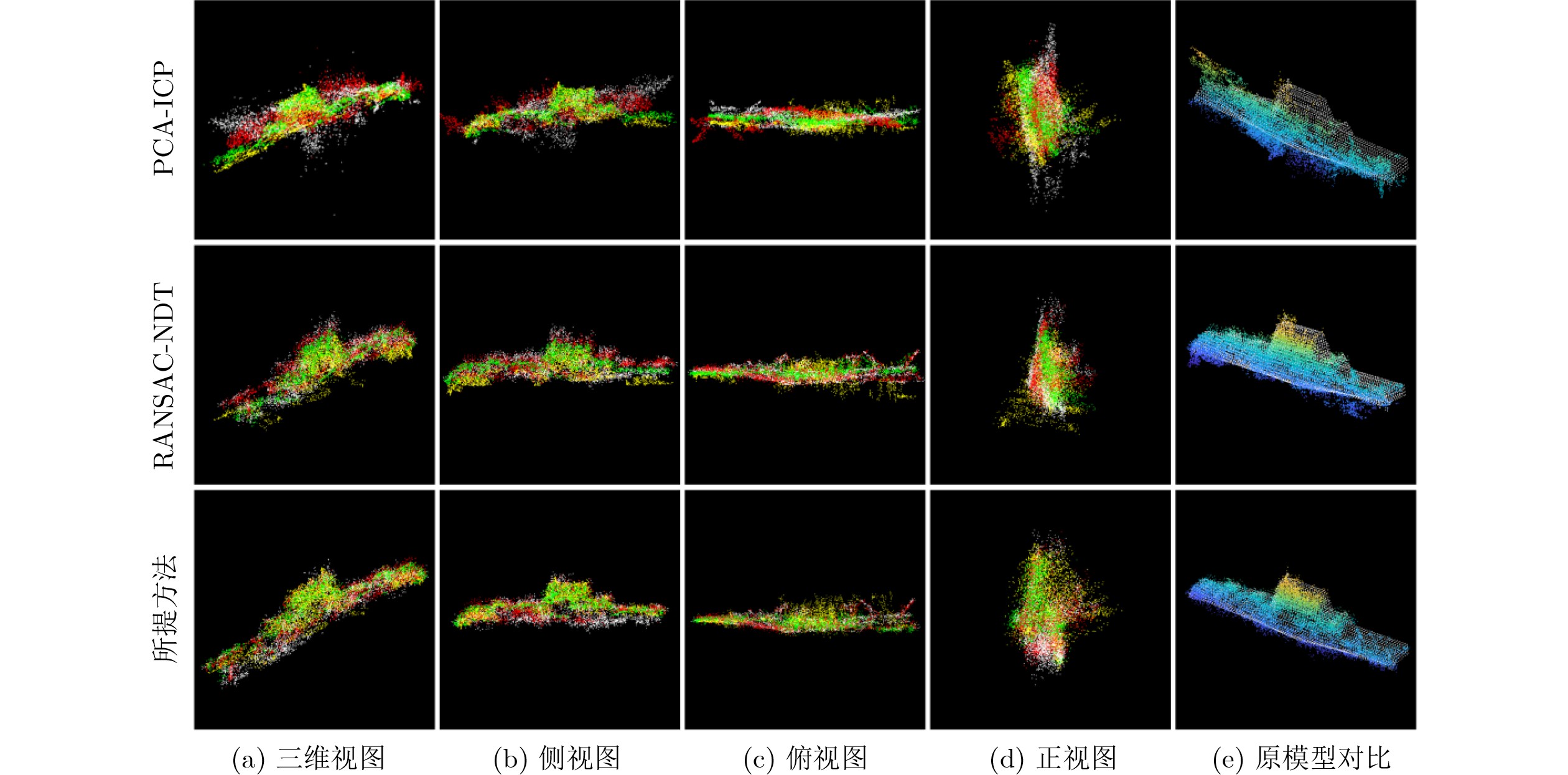
Abstract:Objective Interferometric Inverse Synthetic Aperture Radar (InISAR) is a Three Dimensions (3D) reconstruction technique for non-cooperative target. However, the complex 3D rotational motion of the ship target causes unstable Doppler frequency changes, and Inverse Synthetic Aperture Radar (ISAR) imaging inevitably suffers from target overlap and occlusion problems, making high-precision complete 3D reconstruction difficult under a single projection plane. Thus, a multi-projection planes InISAR 3D reconstruction method of complex moving ship targets based on point cloud fusion is proposed. Through efficient and high-precision point clouds registration and fusion supplement target 3D information, significantly improving the 3D reconstruction quality. Methods This method fully leverages the advantages of multi-plane observation from the severe movement of ship targets, extracts the ship’s centerline and estimates the vertical rotation vector via Principal Component Analysis (PCA), to select the optimal imaging time corresponding to different Imaging Projection Planes, completes ISAR imaging and InISAR 3D reconstruction. Secondly, a point cloud fusion algorithm combining Weighted Random Sampling Consensus (RANSAC) and Hierarchical Iterative Closest Point (ICP) is proposed. The random sampling process is optimized through a feature stability weighting strategy, efficiently extracting and matching corresponding feature points in InISAR images, achieving high-precision multi- Imaging Projection Plane (IPP) point cloud fusion. Results and Discussions Experimental results demonstrate that the proposed method significantly enhances reconstruction accuracy and target completeness. For simulated ship point target data, Fig 7 shows excellent results, with a significant reduction in reconstruction error. Signal-to-noise ratio (SNR) analysis reveals that 3D fusion imaging quality improves continuously as SNR increases from –10 dB to 10 dB, maintaining robust fusion performance even under low SNR conditions. For simulated destroyer radar cross section data, this method achieved significant registration results, and the detail recovery and structural integrity of the fused image were significantly improved, effectively solving the problem of incomplete 3D information reconstruction caused by overlapping and occlusion of scattering points.Conclusions To address the issues of low reconstruction accuracy and information loss caused by target rotation, overlapping, and occlusion in traditional InISAR methods for 3D reconstruction of complex moving ship targets, this paper proposes a multi-IPP InISAR 3D reconstruction method based on point cloud fusion. This method employs a PCA optimal imaging time selection strategy, By employing weighted RANSAC and hierarchical ICP algorithms to achieve efficient and high-precision registration and fusion of InISAR point clouds under multiple IPPs, obtaining high-quality 3D reconstruction results. This paper conducts multi-scenario experiments by constructing a ship model with ideal scattering points and an electromagnetic simulation RCS model with occlusion effects, verifying the accuracy of the proposed method under ideal conditions and its applicability in complex real-world scenarios. -
Key words:
- ISAR imaging /
- InISAR reconstruction /
- ship target /
- multi-projection plane /
- RANSAC-ICP
-
表 1 点云融合算法伪代码
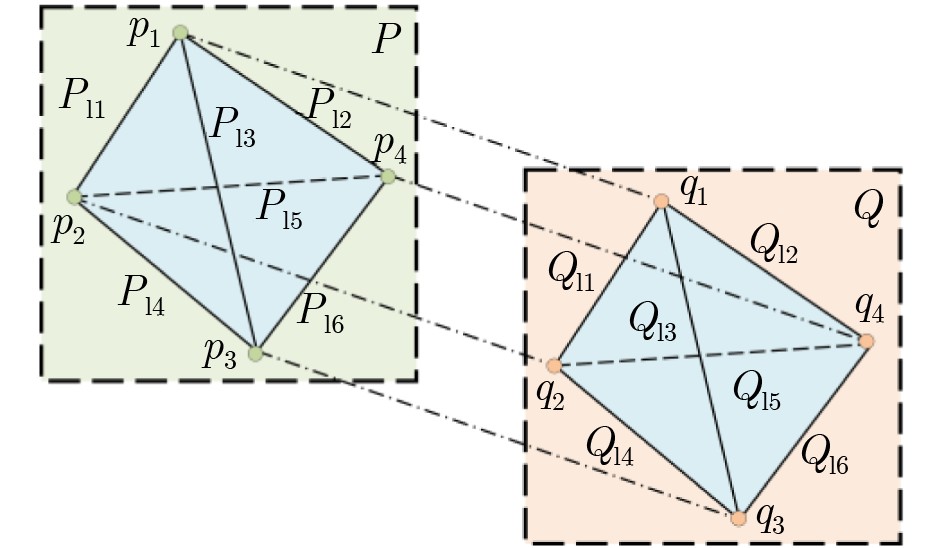
算法:加权 RANSAC 算法:HICP 输入:$ \textit{P} $, $ \textit{Q} $, $ {R}_{1} $, $ {P}_{\text{key}} $, $ {Q}_{\text{key}} $, $ {P}_{\text{FPFH}} $, $ {\textit{Q}}_{\text{FPFH}} $, $ \vartheta $, $ {S}_{\text{num}} $, $ \textit{C}_{\text{in}}^{\text{max}} $, $ {N}_{c} $ 输入:$ \textit{P'} $, $ \textit{Q} $, $ \mathrm{vx} $, $ {\textit{N}}_{\text{f}} $, $ {\textit{D}}_{\text{f}} $ For each $ {p}_{\text{k}i} $ in $ {P}_{\text{key}} $ For n=1 to 2 $ {p}_{\text{k}i} $=GetNeibr($ {P}_{\text{key}} $, $ {p}_{\text{k}i} $, $ {R}_{1} $); If n==1 //低分辨率配准 Obtain $ {\textit{NB}}_{\text{FPFH}} $ by $ {p}_{ij} $ and $ {P}_{\text{FPFH}} $; $ {\textit{P}}_{\text{cur}} $=dowsample($ \textit{P'} $, $ \mathrm{vx} $); Obtain $ \textit{S}_{j}^{\text{soc}} $ by $ {p}_{\text{k}i} $ and $ {\textit{NB}}_{\text{FPFH}} $ and (17); $ {\textit{Q}}_{\text{cur}} $=dowsample($ \textit{Q} $, $ \mathrm{vx} $); $ p_{\textit{i}}^{\text{wei}} $=normalize(mean($ \textit{S}_{j}^{\text{soc}} $)); End If; End For; //计算余弦相似度并获取权重 If n==2 //高分辨率配准 For each $ {p}_{\text{k}i} $ in $ {P}_{\text{key}} $ $ {\textit{P}}_{\text{cur}} $=$ {\textit{P}}_{\text{f}} $, $ {\textit{Q}}_{\text{cur}} $=$ \textit{Q} $; $ [{q}_{\text{bm}},{S}_{\text{best}}]=\text{Match}({p}_{\text{k}i},{P}_{\text{FPFH}},{Q}_{\text{key}},{Q}_{\text{FPFH}}) $; End If; $ \text{lib}_{i}^{\text{match}}=[{p}_{\text{k}i},{q}_{\text{bm}},P_{\text{idx}}^{\text{wei}}] $; For m=1 to $ {\textit{N}}_{\text{f}} $/2+1 //迭代 End For //对关键点进行匹配并配置权重 Obtain $ {q}_{i} $ by KD-tree and $ {p}_{i} $ and $ {\textit{P}}_{\text{cur}} $; For $ i $=1 to $ {N}_{c} $ $ \text{P}{\text{Q}}_{i} $=[$ {p}_{i} $, $ {q}_{i} $]; $ \text{Sa}{\text{m}}_{\text{match}} $=WeightedSample($ \text{lib}_{i}^{\text{match}} $,4); [$ {R}_{\text{f}i} $, $ {T}_{\text{f}i} $]=OLS_SVD($ \text{P}{\text{Q}}_{i} $); //求解(19) Obtain $ \rho $ by $ \text{Sa}{\text{m}}_{\text{match}} $ and (17); $ {\textit{P}}_{\text{cur}} $=$ {R}_{\text{f}i} $·$ {\textit{P}}_{\text{cur}} $+$ {T}_{\text{f}i} $; If $ \rho $>$ \vartheta $ //相异向量判断 Obtain Err by $ {\textit{P}}_{\text{cur}} $ and $ {\textit{Q}}_{\text{cur}} $; $ [{R}_{c},{T}_{c}] $=SVD($ {P}_{\text{sam}} $, $ {Q}_{\text{sam}} $); Count $ C_{\text{in}}^{\text{cur}} $ by $ \textit{P} $ and $ \textit{Q} $; If Err<$ {\textit{D}}_{\text{f}} $ update $ {\textit{R}}_{\text{f}} $, $ {\textit{T}}_{\text{f}} $; break; else Continue; End If; //收敛条件 If $ C_{\text{in}}^{\text{cur}} $>$ \textit{C}_{\text{in}}^{\text{max}} $ update $ {R}_{\text{opt}} $, $ {T}_{\text{opt}} $, $ \textit{C}_{\text{in}}^{\text{max}} $; End If; End For; If $ \textit{C}_{\text{in}}^{\text{max}} $>$ {S}_{\text{num}} $ break; End If; $ {\textit{P}}_{\text{f}} $=$ {\textit{R}}_{\text{f}} $·$ \textit{P'} $+$ {\textit{T}}_{\text{f}} $; End For; //传统RANSAC算法迭代 End For; 输出:$ \textit{P'}\text{=}{R}_{\text{opt}}\cdot P+{T}_{\text{opt}} $; 输出:$ {\textit{P}}_{f} $  下载: 导出CSV
下载: 导出CSV
表 2 InISAR 系统对舰船目标仿真参数
参数 值 中心频率 10 GHz 信号带宽 300 MHz PRF 800 Hz 雷达速度 150 m/s 雷达高度 2 km 舰船速度 10 Kn 基线长度 5 m 雷达到目标距离 30 km 相干积累时间 2 0s
下载: 导出CSV
表 4 各时间段配准精度
海况 海况1 海况2 误差 平均误差(m) 中值误差(m) 均方根误差(m) 平均误差(m) 中值误差(m) 均方根误差(m) 时间段1和2 2.1011 1.4678 2.7251 2.9879 2.4311 2.6162 时间段3和2 1.7467 1.6310 2.3973 2.2799 1.5976 1.9244 原始模型对比 1.4194 0.9410 1.9523 1.2855 0.9804 1.6035
下载: 导出CSV
表 5 驱逐舰三维成像结果点云配准精度
平均误差(m) 中值误差(m) 均方根误差(m) 时间段1和2 1.1445 0.9841 1.3466 时间段1和3 1.0965 0.9880 1.2449 时间段1和4 2.2753 1.5635 3.1008
下载: 导出CSV
-
[1] SOMMER A and OSTERMANN J. Backprojection subimage autofocus of moving ships for synthetic aperture radar[J]. IEEE Transactions on Geoscience and Remote Sensing, 2019, 57(11): 8383–8393. doi: 10.1109/TGRS.2019.2920779. [2] TIAN Biao, WU Wenzhen, LIU Yang, et al. Interferometric ISAR imaging of space targets using pulse-level image registration method[J]. IEEE Transactions on Aerospace and Electronic Systems, 2023, 59(3): 2188–2203. doi: 10.1109/TAES.2022.3209950. [3] GIUSTI E, GHIO S, MARTORELLA M, et al. Ship-borne 3D ISAR imaging[C]. Proceedings of the 2024 International Radar Conference (RADAR), Rennes, France, 2024: 1–6. doi: 10.1109/RADAR58436.2024.10993838. [4] HOU Kaifu, FAN Huayu, LIU Quanhua, et al. Three-dimensional reconstruction of target based on phase-derived technology[J]. IEEE Transactions on Geoscience and Remote Sensing, 2025, 63: 4102612. doi: 10.1109/TGRS.2025.3541041. [5] HOU Xiyue, AO Wei, XU Feng, et al. End-to-end automatic ship detection and recognition in high-resolution Gaofen-3 spaceborne SAR images[C]. Proceedings of the 2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 2019: 9486–9489. doi: 10.1109/IGARSS.2019.8900619. [6] ZHANG Yun, LI Long, LIAO Wangling, et al. Three-dimensional reconstruction of ship target on MEO SAR/ISAR hybrid imaging[C]. Proceedings of the IGARSS 2024–2024 IEEE International Geoscience and Remote Sensing Symposium, Athens, Greece, 2024: 3344–3347. doi: 10.1109/IGARSS53475.2024.10642865. [7] WANG Yu, LI Shuai, HE Tingting, et al. Three-dimensional point cloud reconstruction of inverse synthetic aperture radar image sequences based on back projection and iterative closest point fusion[J]. IET Radar, Sonar & Navigation, 2023, 17(3): 503–521. doi: 10.1049/rsn2.12356. [8] RONG Jiajia, WANG Yong, and HAN Tao. Interferometric ISAR imaging of maneuvering targets with arbitrary three-antenna configuration[J]. IEEE Transactions on Geoscience and Remote Sensing, 2020, 58(2): 1102–1119. doi: 10.1109/TGRS.2019.2943613. [9] 毕严先, 魏少明, 王俊, 等. 基于最小二乘估计的InISAR空间目标三维成像方法[J]. 电子与信息学报, 2016, 38(5): 1079–1084. doi: 10.11999/JEIT151000.BI Yanxian, WEI Shaoming, WANG Jun, et al. Interferometric ISAR imaging for 3-D geometry of uniformly rotating targets based on least squares estimation method[J]. Journal of Electronics & Information Technology, 2016, 38(5): 1079–1084. doi: 10.11999/JEIT151000. [10] YIN Zhiping, ZHANG Dongchen, CHEN Weidong, et al. 3-D ISAR imaging reconstruction of non-uniformly rotating targets with FRFT technique[C]. Proceedings of the 2009 IET International Radar Conference, Guilin, China, 2009: 1–4. doi: 10.1049/cp.2009.0468. [11] WANG Yong and CHEN Xuefei. 3-D interferometric inverse synthetic aperture radar imaging of ship target with complex motion[J]. IEEE Transactions on Geoscience and Remote Sensing, 2018, 56(7): 3693–3708. doi: 10.1109/TGRS.2018.2806888. [12] 汪玲. 逆合成孔径雷达成像关键技术研究[D]. [博士论文], 南京航空航天大学, 2006.WANG Ling. Study on key technologies of inverse synthetic aperture radar imaging[D]. [Ph. D. dissertation], Nanjing University of Aeronautics and Astronautics, 2006. [13] CAO Rui, WANG Yong, YEH C, et al. A novel optimal time window determination approach for ISAR imaging of ship targets[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2022, 15: 3475–3503. doi: 10.1109/JSTARS.2022.3161204. [14] CAO Rui, WANG Yong, ZHANG Yun, et al. Optimal time selection for ISAR imaging of ship target via novel approach of centerline extraction with RANSAC algorithm[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2022, 15: 9987–10005. doi: 10.1109/JSTARS.2022.3220496. [15] WANG Yong and LI Xuelu. Three-dimensional interferometric ISAR imaging for the ship target under the bi-static configuration[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2016, 9(4): 1505–1520. doi: 10.1109/JSTARS.2015.2513774. [16] ZHANG Junqiu and WANG Yong. An optimal time selection method for 3-D imaging of ship targets via distributed InISAR[J]. IEEE Geoscience and Remote Sensing Letters, 2024, 21: 4014005. doi: 10.1109/LGRS.2024.3436550. [17] SALVETTI F, GIUSTI E, STAGLIANÒ D, et al. Incoherent fusion of 3D InISAR images using multi-temporal and multi-static data[C]. Proceedings of the 2016 IEEE Radar Conference, Philadelphia, USA, 2016: 1–6. doi: 10.1109/RADAR.2016.7485133. [18] SALVETTI F, MARTORELLA M, GIUSTI E, et al. Multiview three-dimensional interferometric inverse synthetic aperture radar[J]. IEEE Transactions on Aerospace and Electronic Systems, 2019, 55(2): 718–733. doi: 10.1109/TAES.2018.2864469. [19] CAI J, MARTORELLA M, GUO J, et al. 3D ISAR imaging: Multi-view image fusion problem[C]. Proceedings of the IET International Radar Conference (IET IRC 2020), Chongqing, China, 2020: 1200–1204. doi: 10.1049/icp.2021.0620. [20] ZHANG Shuting, WANG Hongtao, WANG Cheng, et al. An improved RANSAC-ICP method for registration of SLAM and UAV-LiDAR point cloud at plot scale[J]. Forests, 2024, 15(6): 893. doi: 10.3390/f15060893. [21] HUANG Xuwei and HU Min. 3D reconstruction based on model registration using RANSAC-ICP algorithm[C]. Proceedings of the Transactions on Edutainment XI, Berlin, Heidelberg, 2015: 46–51. doi: 10.1007/978-3-662-48247-6_4. [22] EL BANANI M, GAO Luya, JOHNSON J, et al. UnsupervisedR&R: Unsupervised point cloud registration via differentiable rendering[C]. Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, USA, 2021: 7125–7135. doi: 10.1109/CVPR46437.2021.00705. -






图(11) / 表(5)
计量
- 文章访问数: 164
- HTML全文浏览量: 51
- PDF下载量: 36
- 被引次数: 0
 下载:
下载:
