| Citation: | WU Lin, CAO Wen. YOLO-SCDI: A Vehicle Detection Algorithm Based on an Improved YOLOv8[J]. Journal of Electronics & Information Technology, 2025, 47(10): 3967-3978. doi: 10.11999/JEIT250238

|

| [1] |
王宇. 基于深度学习的目标检测算法综述[J]. 科技资讯, 2025, 23(2): 64–66. doi: 10.16661/j.cnki.1672-3791.2407-5042-8334.
WANG Yu. An overview of object detection algorithm based on deep learning[J]. Science & Technology Information, 2025, 23(2): 64–66. doi: 10.16661/j.cnki.1672-3791.2407-5042-8334.
|
| [2] |
LI Jiewen, ZHAO Zhicheng, WU Yanlan, et al. HOG-VGG: VGG network with HOG feature fusion for high-precision PolSAR terrain classification[J]. Journal of Harbin Institute of Technology (New Series), 2024, 31(5): 1–15. doi: 10.11916/j.issn.1005-9113.2023089.
|
| [3] |
王宁, 智敏. 深度学习下的单阶段通用目标检测算法研究综述[J]. 计算机科学与探索, 2025, 19(5): 1115–1140. doi: 10.3778/j.issn.1673-9418.2411032.
WANG Ning and ZHI Min. Review of one-stage universal object detection algorithms in deep learning[J]. Journal of Frontiers of Computer Science and Technology, 2025, 19(5): 1115–1140. doi: 10.3778/j.issn.1673-9418.2411032.
|
| [4] |
陈憶悯, 李万益, 翁汉锐, 等. 基于深度学习的两阶段目标检测算法综述[J]. 信息与电脑(理论版), 2023, 35(14): 112–114.
CHEN Yimin, LI Wanyi, WENG Hanrui, et al. Overview of two-stage object detection algorithms based on deep learning[J]. Information & Computer, 2023, 35(14): 112–114.
|
| [5] |
GIRSHICK R, DONAHUE J, DARRELL T, et al. Rich feature hierarchies for accurate object detection and semantic segmentation[C]. 2014 IEEE Conference on Computer Vision and Pattern Recognition, Columbus, USA, 2014: 580–587. doi: 10.1109/CVPR.2014.81.
|
| [6] |
REN Shaoqing, HE Kaiming, GIRSHICK R, et al. Faster R-CNN: Towards real-time object detection with region proposal networks[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(6): 1137–1149. doi: 10.1109/TPAMI.2016.2577031.
|
| [7] |
HE Kaiming, GKIOXARI G, DOLLÁR P, et al. Mask R-CNN[C]. 2017 IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 2017: 2980–2988. doi: 10.1109/ICCV.2017.322.
|
| [8] |
DING Jian, XUE Nan, LONG Yang, et al. Learning RoI transformer for oriented object detection in aerial images[C]. 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, USA, 2019: 2844–2853. doi: 10.1109/CVPR.2019.00296.
|
| [9] |
LIU Wei, ANGUELOV D, ERHAN D, et al. SSD: Single shot MultiBox detector[C]. 14th European Conference on Computer Vision, Amsterdam, The Netherlands, 2016: 21–37. doi: 10.1007/978-3-319-46448-0_2.
|
| [10] |
REDMON J, DIVVALA S, GIRSHICK R, et al. You only look once: Unified, real-time object detection[C]. 29th IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, USA, 2016: 779–788. doi: 10.1109/CVPR.2016.91.
|
| [11] |
VARGHESE R and Sambath M. YOLOv8: A novel object detection algorithm with enhanced performance and robustness[C]. 2024 International Conference on Advances in Data Engineering and Intelligent Computing Systems (ADICS), Chennai, India, 2024: 1–6. doi: 10.1109/ADICS58448.2024.10533619.
|
| [12] |
张浩晨, 张竹林, 史瑞岩, 等. YOLO-CDC: 优化改进YOLOv8的车辆目标检测算法[J]. 计算机工程与应用, 2025, 61(13): 124–137. doi: 10.3778/j.issn.1002-8331.2411-0390.
ZHANG Haochen, ZHANG Zhulin, SHI Ruiyan, et al. YOLO-CDC: Improved YOLOv8 vehicle object detection algorithm[J]. Computer Engineering and Applications, 2025, 61(13): 124–137. doi: 10.3778/j.issn.1002-8331.2411-0390.
|
| [13] |
许德刚, 王双臣, 尹柯栋, 等. 改进YOLOv8的城市车辆目标检测算法[J]. 计算机工程, 2024, 60(18): 136–146. doi: 10.3778/j.issn.1002-8331.2401-0277.
XU Degang, WANG Shuangchen, YIN Kedong, et al. Improved YOLOv8 urban vehicle target detection algorithm[J]. Computer Engineering and Applications, 2024, 60(18): 136–146. doi: 10.3778/j.issn.1002-8331.2401-0277.
|
| [14] |
寇发荣, 肖伟, 何海洋, 等. 基于改进YOLOv5的煤矿井下目标检测研究[J]. 电子与信息学报, 2023, 45(7): 2642–2649. doi: 10.11999/JEIT220725.
KOU Farong, XIAO Wei, HE Haiyang, et al. Research on target detection in underground coal mines based on improved YOLOv5[J]. Journal of Electronics & Information Technology, 2023, 45(7): 2642–2649. doi: 10.11999/JEIT220725.
|
| [15] |
项家灏, 徐慧英, 徐广平, 等. MECW-YOLO: 基于改进YOLOv8的无人机视角小目标检测算法[J/OL]. 计算机工程与科学, 1–12[2025-03-20]. https://link.cnki.net/urlid/43.1258.TP.20241225.1106.008.
XIANG Jiahao, XU Huiying, XU Guangping, et al. MECW-YOLO: An algorithm for detecting small targets in drone perspective using improved YOLOv8[J/OL]. Computer Engineering & Science, 1–12[2025-03-20]. https://link.cnki.net/urlid/43.1258.TP.20241225.1106.008.
|
| [16] |
SI Yunzhong, XU Huiying, ZHU Xinzhong, et al. SCSA: Exploring the synergistic effects between spatial and channel attention[J]. Neurocomputing, 2025, 634: 129866. doi: 10.1016/j.neucom.2025.129866.
|
| [17] |
ZHAO Yian, LV Wenyu, XU Shangliang, et al. DETRs beat YOLOs on real-time object detection[C]. 2024 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, USA, 2024: 16965–16974. doi: 10.1109/CVPR52733.2024.01605.
|
| [18] |
DAI Xiyang, CHEN Yinpeng, XIAO Bin, et al. Dynamic head: Unifying object detection heads with attentions[C]. 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Nashville, USA, 2021: 7369–7378. doi: 10.1109/CVPR46437.2021.00729.
|
| [19] |
TIAN Zhi, SHEN Chunhua, CHEN Hao, et al. FCOS: Fully convolutional one-stage object detection[C] 2019 IEEE/CVF International Conference on Computer Vision, Seoul, Korea (South), 2019: 9626–9635. doi: 10.1109/ICCV.2019.00972.
|
| [20] |
WANG Xinjiang, ZHANG Shilong, YU Zhuoran, et al. Scale-equalizing pyramid convolution for object detection[C]. 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, USA, 2020: 13356–13365. doi: 10.1109/CVPR42600.2020.01337.
|
| [21] |
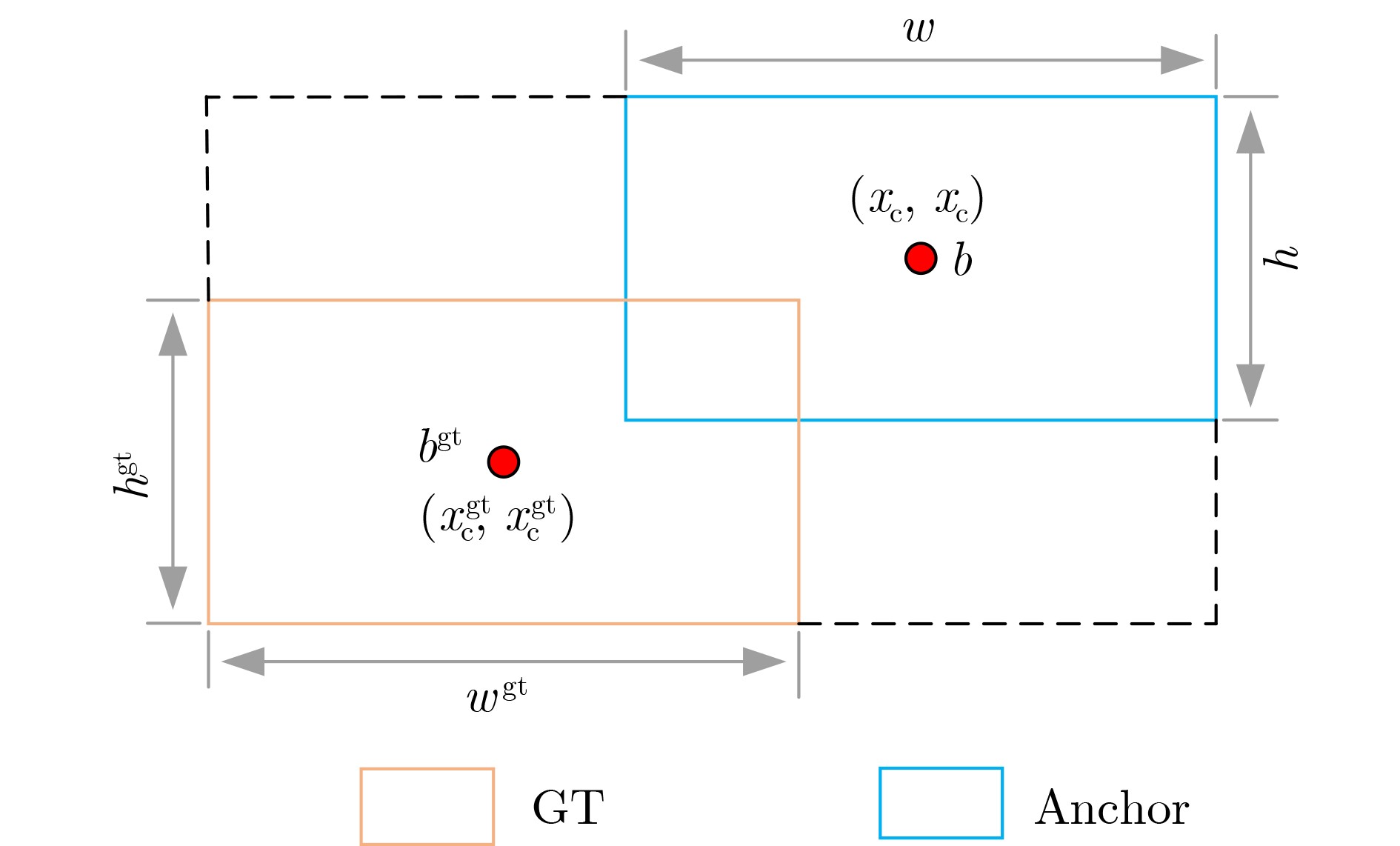
ZHANG Hao and ZHANG Shuaijie. Shape-IoU: More accurate metric considering bounding box shape and scale[EB/OL]. https://arxiv.org/abs/2312.17663, 2023.
|
| [22] |
ZHANG Hao, XU Cong, and ZHANG Shuaijie. Inner-IoU: More effective intersection over union loss with auxiliary bounding box[EB/OL]. https://arxiv.org/abs/2311.02877, 2023.
|
Figures(8) / Tables(5)


 DownLoad:
DownLoad: